Great work, Uwe, as usual!
Need to buy a new notebook before I can support Julia Install.
This may be best as a spit-off topic, as I am not seeing that Julia models kite flight aeroelastically, but as a one-point or four-point mass for the basic control purpose and real time performance intended. There are simplified aeroelastic models not yet applied widely, nor in Julia.
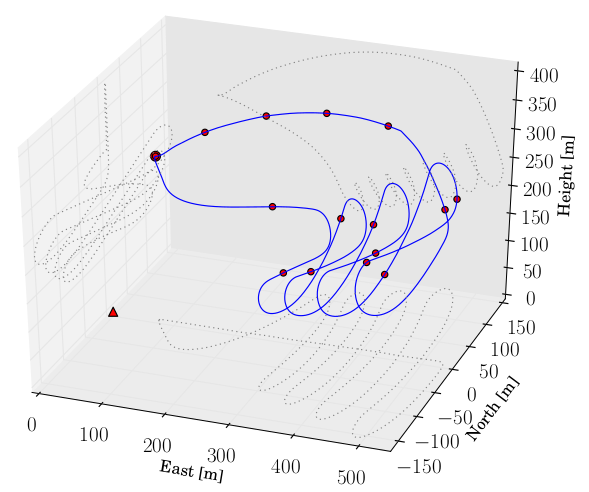
One major difference in closely observed kite dynamics is how kites constantly hunt in 6DOF, and these self-oscillations are not commonly modeled, and control systems can impose their own periodicities. It’s a chaotic swamp up there.
Folks are aware of the “Passive Control” AWES paradigm that seeks designs with inherent Dynamic Stability under active exception-handling. Instead of Active Control Derivatives, Passive Stability Derivatives are most studied in Passive Control.
We hope for analytic convergence of the two paradigms, but much more work before these uniformly combine in one elegant framework, so specific designs varying in the control-stability parameters can be rigorously compared in simulation or controlled in specific practice for highly passive designs.
Pondering how PID control oscillations correspond to aerobody harmonics. I guess the idea is active control loops oscillating so fast that aeroelastic harmonics don’t interfere. In passive control, the embodied logic is coupled directly at aeroelastic frequencies.
The Kite Window can now be seen as a field of Positive Control-loop Feedback in the Power Zone, and Negative Feedback at the edges (disregarding gravity for the moment). This is a small step in formally unifying the two control paradigms.
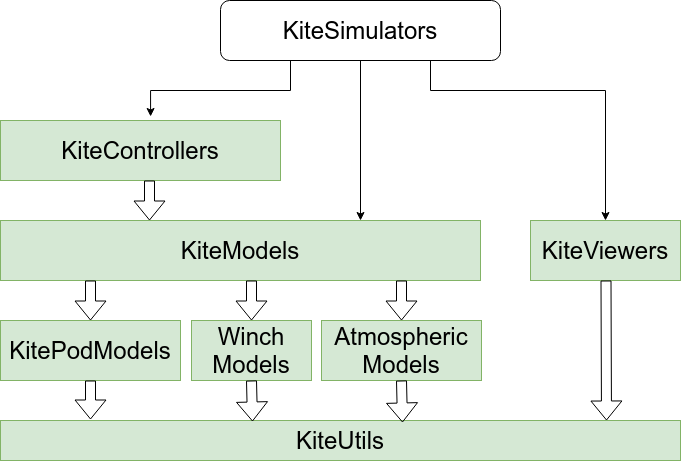
Do you have any particular thoughts on this topic? Will Julia someday be supporting greater multi-physics, perhaps by operating kite models over a powerful conventional solver?
Thanks!
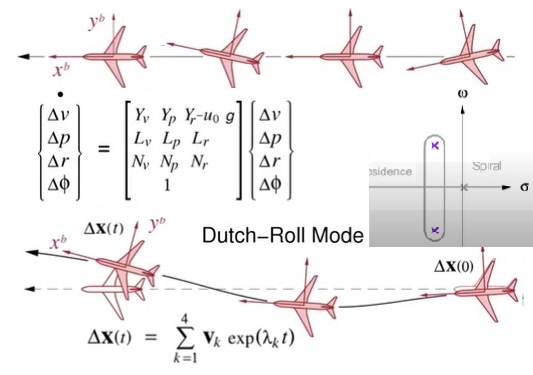
Oh, Dutch Roll is passive fig8 flying-
PS. Thinking through relation of flight control to stability (C&S), a stabilizer surface acts like a control surface when deflected accordingly. Thus, as a kite wanders across the kite window or encounters turbulence, AoA varies passively much as directing an elevator actively would. This seems like a classic reference-frame issue that may resolve fairly simply, even at the user interface layer, rather than require a complex reworking of the deep flight dynamics.
Control-stability saturation is another aspect of a realistic sim, whereby turbulence can overpower C&S.