This is one of the silly things about AWE stated goals versus actual skillsets.
Just because people were out there having a good time kitesurfing, they thought they had somehow magically mastered wind-generated electricity. In 15 years of big talk, I noticed none of the big talkers even had a kite that could launch and land by itself, assuming kites would even play a role in AWE, of which they had no doubt. Will kites even play a role? No way to say, at this point.
And these days, we hear talk of autonomous launches and landings, but I still don’t see anything in regular, daily operation, despite years of statements to the contrary. As for giving an opinion on a description of hoped-for operating parameters for something which doesn’t exist, I’m not sure what to say, but if it doesn’t exist, it doesn’t exist.
And as far as scoring matrices for AWE systems goes, depending on who is doing the scoring, everyone from Altaeros, to Makani, to the kite-reelers, would probably have scored high and received glowing recommendations by someone, at some point. Just read the old articles on them all.
Turns out they were all just more people erroneously thinking they had superseded regular wind turbines, just like all the vertical-axis wannabe inventors out there. At least, even though the vertical-axis machines used more material, cost more, and performed worse, you could point to vertical-axis turbines in regular operation, even if they only last about a year before self-destruction.
Maybe you should come visit Kitemill’s site to get updated on this. Though you have not heard many press releases on this because there are a few details missing for it to be 100% hands off.
I know a few companies we have been in touch with also state that launch and land is working or close to completed.
Also please remember that developing AWE is a massive effort, and launch/land may not be top priority. So if someone did have this 110% ready, you would probably just point out that another aspect was lacking.
Well, maybe, but the lack of auto-launch-land for even any simple kite has always seemed a glaring omission for the people who kept saying “kires, kites, kites”, and “The Kite Gods” were going to solve everything, etc.
Meanwhile, people are still musing over whether to fly a figure-8 or a circle, whether to have a generator onboard or not, whether to use helium or not, etc., just like it’s still day-one in AWE.
Autonomous launch/land may not be a top priority but it is essential for the success of a project. An exception to this would be extremely large projects where you can afford to have a permanent staff on site.
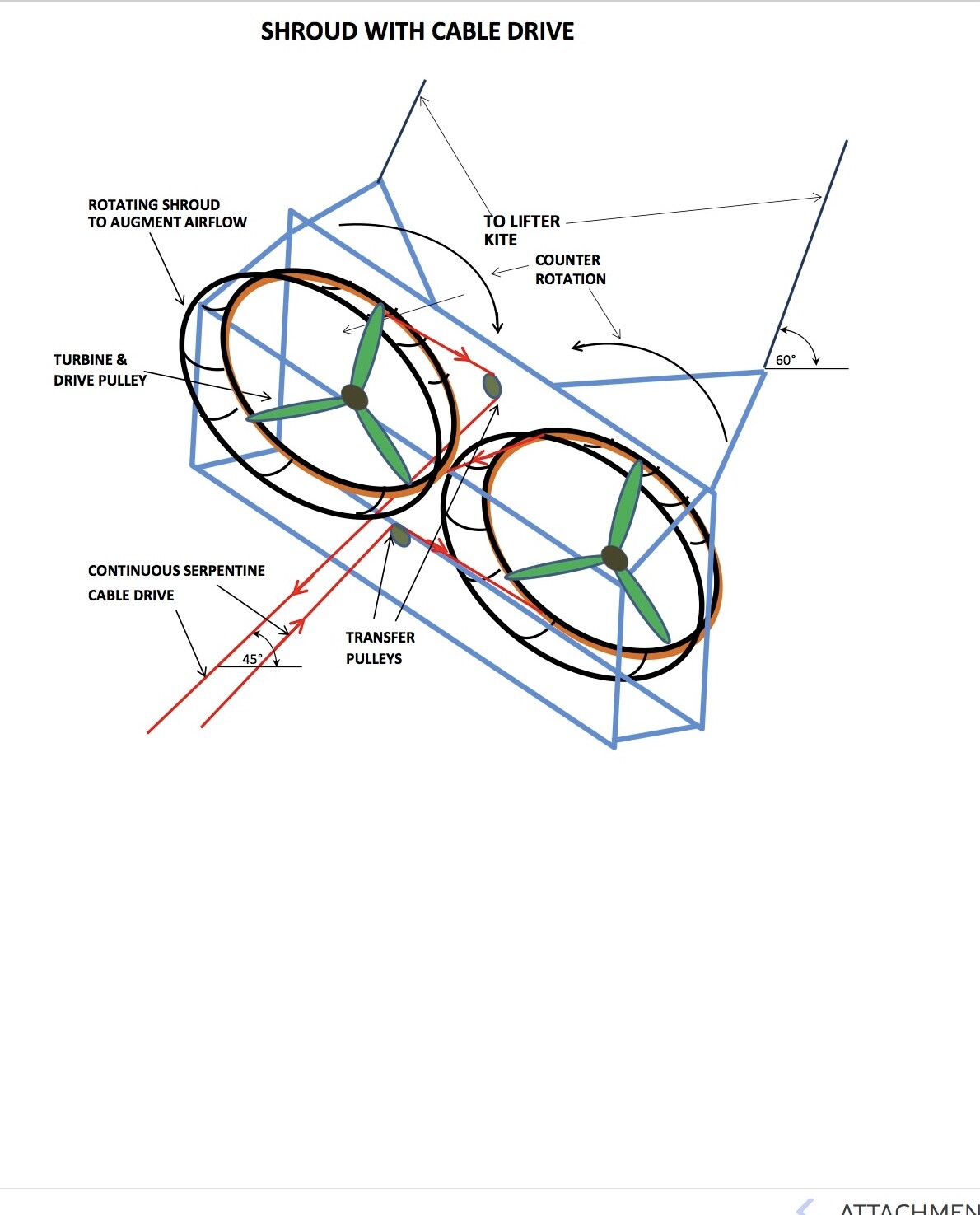
If we try to scale up Kiwee, then the size of the turbines increase and their optimal rotation speed decreases. In order for the cable drive to work satisfactorily, we need higher linear velocities of the cable. This will result in lower tensions in the cables and therefore thinner and lighter cables. Different sized pulleys can be used and substituted for a gear reducer, which greatly reduces the weight of the airborne system. We therefore need a large pulley at the turbine and a small pulley at the ground generator. It occurs to me that this large pulley can be used for other purposes in the device. Firstly, this pulley can be firmly attached to the tips of the three blades of the turbine. This will stabilize the blades and make them much stronger. Secondly, part of the pulley could be shaped in the form of a shroud, which could direct the air towards the blades, and improve the efficiency of the device. (See diagram). Although this pulley/shroud system will increase the weight of the device, it also acts as a flywheel which tends to keep the RPM constant.
I feel that the Kitewinder system is truly different from all other systems for the main reason that the turbines are oriented to face the wind directly, therefore eliminating cosine cubed losses. It is the only system that can operate at high altitudes without incurring these losses. For some reason this system has not been discussed in any of the high altitude wind reports.
The Kitewinder is a static system, which would involve minimal land area if multiple systems were placed next to each other. My concept is to eliminate the reelout/reelin function and use auxiliary lines attached to the lifter kite to launch and land the system where the tether is always fully extended.
This would be an interesting experiment. Unfortunately I can’t find it on the site - only the water drag generator.
A few thoughts on it:
The large rotor pulley can even be smaller (e.g. 1/3 - 1/2 rotor’s size). That would allow increasing the blades with less drag&weight penalty than a shroud
Pulley alignment would be tricky, preventing the rope skipping off it (e.g. during launch/landing) even trickier
Launching it alone without human hands involved is tricky too.
The pulling rope is better kept above the return one. In image this is reversed - this isn’t ideal since the return rope has lower tension, therefore more sag - if it is on top the two will eventually cross and wipe each other - that friction between pull and return lines will chew it slowly.