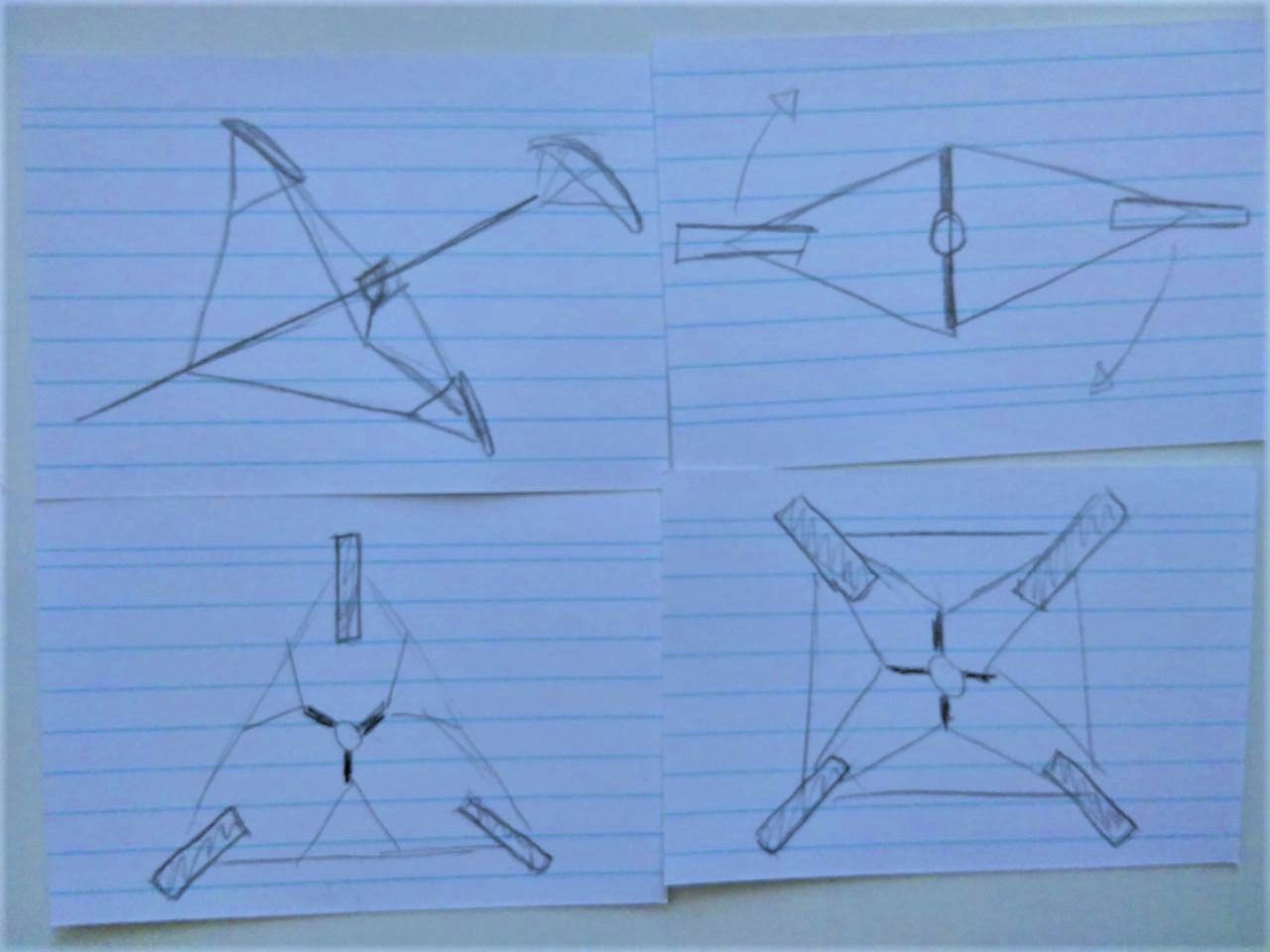
Sketches. Flygen. Thick lines are rods, rest are tensile.
Counterotating blades / vane / second line to keep generator from rotating with the blades is omitted in these sketches.
1 Like
Legit :)…
I think one reason that Makani has the rotors on the wing is that its easier to extract energy from a fast spinning generator than a slow spinning one. If you scale that thing up, its going to be slowly rotating with large forces at the center. Large for es and slow speed -> heavy.
Now I think you don’t necessarily need 3, 2 with a rigid Y or T section on the line would maybe also work. The centrifugal force then forces the wings to pull the tops of the Y or T behind it.
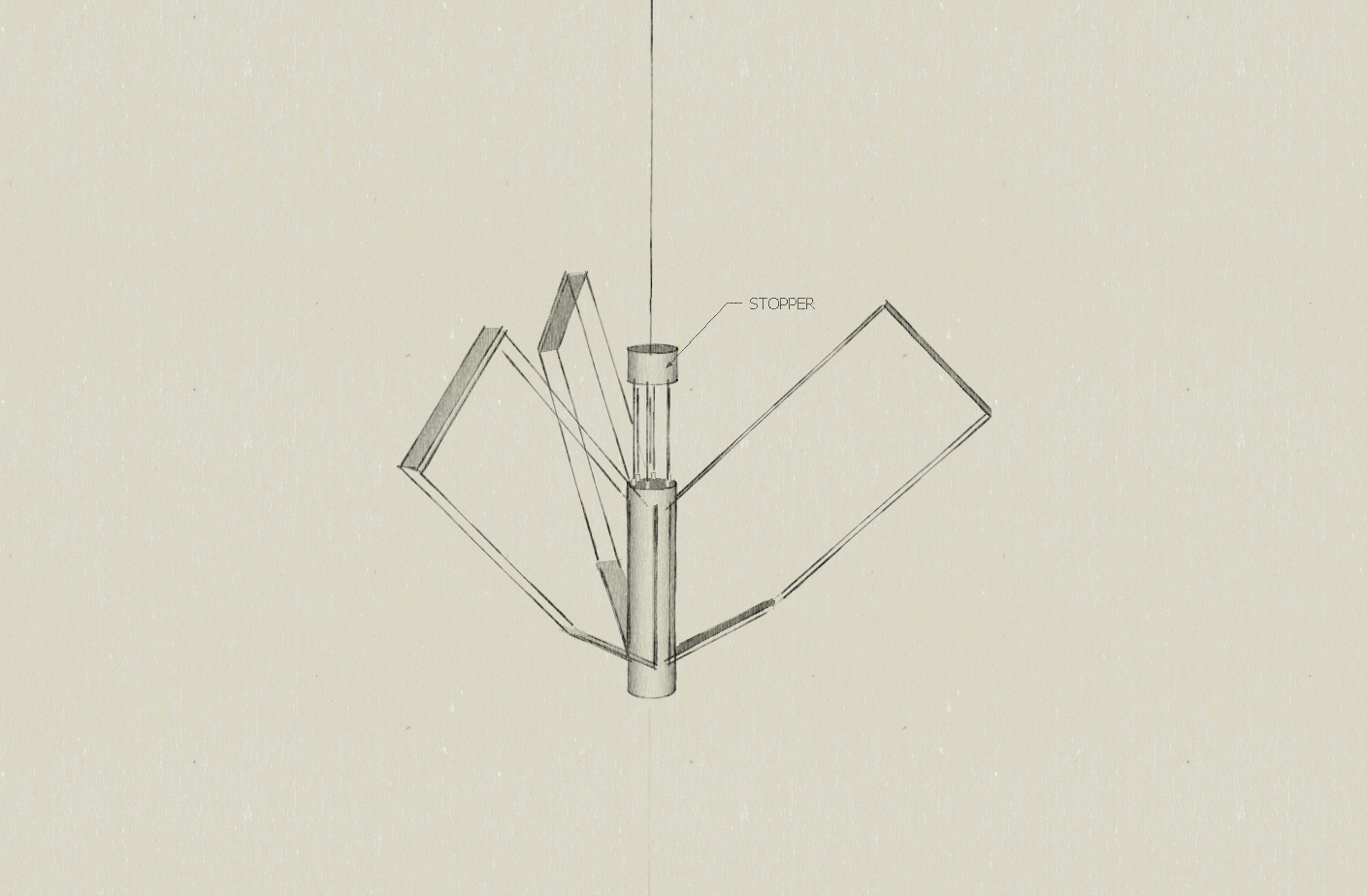
Here is an idea, in rest the wings would sit on the central cylinder, in flight the wings would pull the cylinder up, thereby also increasing the length of their tethers.
With this concept I think there will be less torque transmission possible. No torque is transmitted in the position you’ve drawn it. The kites would need to fly ahead of the rigid sections.
Also: It’s either lift that pulls the kites outward or the wings have significant mass.
Do your ideas allow more torque transmission? I put the wings in a 45 degree angle to pull them outwards, a compromise between a VAWT (outward force, greater torque transmission) and HAWT (self-starting, more efficient). I’m hindered by not being able to calculate the forces yet.
How to increase the torque transmission is left as an exercise for the reader for now, this is firstly just the start of an idea on how to make a tensile system self-starting. Edit: and I don’t much like it now anymore. I think it relies on constraints that a real-world system would not have.
Yes I think so. But it’s just first sketches. There’s certainly a lot to optimize.
The system you’ve drawn would certainly be able to transmit torque as well. I was just pointing out that when the kites are in line with the rigid section they only pull outward. I’m not doing any calculations either btw.
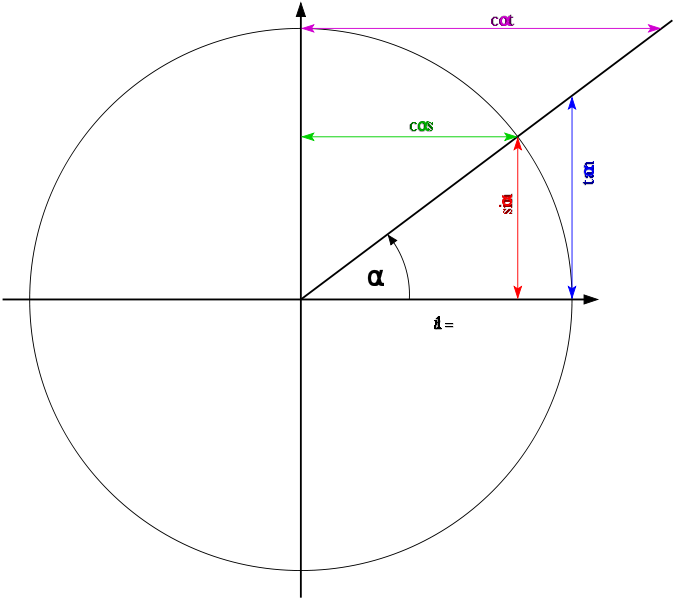
[Edit: Looking onto the system]
If the lift vector [projected on the plane] being the black line and alpha the angle between rigid section and tether then the red sin arrow shows how large the force pulling the rigid section is. When alpha=0 it is 0. When they are orthagonal, all of the lift force is pulling the rigid section.
I’ve just now understood how the system would self-start. I’ve been thinking about something similar as well.
Maybe the blades could just be on rods that fold out from the central axis tether but don’t don’t serve a function when then the blades have folded out. Just keeping the blades opposite until everything is tensioned properly.
dave santos posted:
On the New Forum, a known problem was stated: “The lifter will put a heavy toll on your efficiency for yoyo/lift based AWE.”
kPower/KiteLab-network solution- Free reeling (“yoyo”) motion can be supported from a static pilot-lifter by rigging a reeling cableway, plus elastic leader under the pilot kite to buffer power-kite pattern motion, in a balanced dance (the elasticity returns energy to the power-wing sweep pattern, the pilot does a nice little dance, with some reaction sweep, but no jerking).
Re: Efficiency, adding pilot-lift this way enhances efficiency of any existing reeling scheme, since pilot-lift has inherent high power-to-weight to offset mass penalty of the working power wing part. This is especially helpful in lower wind conditions, to maintain some AWES output. A pilot-kite also offsets active control requirements (mass, power, and high cost).
kPower is the most experienced developer of hybrid pilot-lifter and power-kite AWE rigging methods, in the Open-AWE_IP-Cloud
One could always give the lifter kite depower ability. The problem does seem a bit difficult to deal with to me. You need some kind of energy storage. You can get free energy when reeling in by using a bungee/winch between your AWE rig and lifter kite, but you need to put that energy back later when the next production phase starts and the lifter kite needs to be reeled back in. A bungee is possible, but a bungee is not a controlled element, so there might be losses.
If you need a lifter kite, perhaps flygen or torsion transfer are better options than yoyo?
Classic winch, yo-yo concepts are still the best.
[Edit: With the exception of Makani style flygen]
The only reason why I was suggesting anything else is to see if there is a plausible passively stable low-tech system.
I’ll add an idea for multi wing launch: if you have a means of lifting the multiwing rig to some altitude, then dropping it. Next you let the wings fly outwards while reeling in with the winch at high speed. Once the mesh tightens, continue with production/return yoyo phases.
Once you get there, you dont need the lifter/pilot, just add some active control to your wings to place the rotor where you want. Either using a kind of slipring attached to a bridle, or using actuators on the wings themselves.
There are a lot of issues with this though. I think one is handling large wings that are not flying in possibly high winds.
Dave Santos posted:
Of course one can create a depower mode for a pilot-lifter, like WPI demoed, but its still an compounded parasitic factor to drag it back down during a reeling cycle, so this reeling-cableway method avoids that extra drag while maintaining simple pilot-lift flight. We have never before thought to reel-in a pilot-lifter along with its power-wing, as a unit, since that’s even more wasteful than just reeling a power wing, already very wasteful. Its not just the powered drag loss, but the return cycle time. The quote from the New Forum is taken as true, unless a method as suggested is applied.
On this Old Forum, Northern EU popularity of Reeling down-select has been a mystery, while most of our schemes have been on non-reeling fully-crosswind load motion, esp… short-stroke pumping where a bit of elastic works well to return energy in the pumping cycle while buffering the pilot-lifter.
The good news is the diversity of AWES approaches, so that every major approach is being fielded, and could be comparatively tested in a future shake-out fly-off program. No one can claim that Reeling is not well represented by the formidable EU developers, but can they beat pure crosswind motion as laid out by Payne, Hadzicki, Goldstein, etc.? They have made a big bet on Reeling cycles up and downwind.
Tethered loose masses will tend to stabilize spaced evenly around the orbit, much like Saturn’s rings distribute mass tethered by gravity.
Where is formal proof or tested evidence for the claims copied below?
“Classic winch, yo-yo concepts are still the best.
[Edit: With the exception of Makani style flygen]”
Actually had wind for once and tested this with only one foamcore board as a wing.To my surprise it acutally worked somewhat.
Will try two blades next and if that works, try to get a pair of counterrotating turbines. Will probably need to include fibreglass rods just to keep the blades in position for the launch.
I think @PierreB has experience with kites rotating around the lifting line.
3 Likes
I was clicking through Self-oscillation - Wikipedia and somehow ended up at 2-Dimensional Flows, Limit Cycles, Lecture 1. Maybe stable and unstable limit cycles are relevant to this. Also: Model Predictive Control.