It seems almost as difficult to name all this stuff correctly as it is to make it work usefully.
The classification should be «lift-type» for eg Makani and «drag-type» for eg Kitemill.
The distinction is if the power of the plant derives from the blades moving downwind (drag) or by applying a harvesting force opposite of the blade speed (lift)
I agree Loyd got it opposite in his paper.
This should be the most fundamental classification in AWE, and now completely aligned with traditional wind.
I dont like conflating the lift and drag terms, but it seems this «damage» has already been done.
I would like to applaud @dougselsam in pointing this out. I had not given this enough thought, but he was right all along on this one.
I would like to point out one detail; a HAWT is still lift-type even placed on a ship travelling downwind [assuming the primary objective is to generate electrical power, not downwind propulsion force], just like a VAWT is still drag-type on the same ship.
A final thought; AWE may be the field where drag-type wind power plants finally prosper. The thought that lift-type is superior to drag-type is a rule of thumb that stems from traditional windmills. For AWE, the design pressures and possibilities are different, and so may the outcome of any evolution in AWE
1 Like
For an aligned or even a common classification of AWES with ground-based wind turbines, I suggest two main criteria, in the following order:
-
SWEPT AREA
For current wind turbines only stationary swept area
For AWES stationary swept area (fly-gen like Makani, rotary like Daisy or Kiwee turbine…) or downwind swept area (all yo-yo systems, including Kitemill, Guangdong parachute…) -
BLADE OR WING MOTION
Lift-based blade or wing motion for wind turbines and AWES when blades or wings are going crosswind at several times the wind speed (three-bladed HAWT, VAWT Darrieus-type, Makani, Kitemill) in both stationary and downwind swept area categories
Drag-based blade or wing motion for wind turbines and AWES when blades or wings are going at wind speed or less, being pushed by the wind (VAWT Savonius, Magenn in stationary swept area, Guangdong parachute in downwind swept area)
The thing is, yoyo has more in common with a savonius windmill, as the blades are producing because they are moving downwind. The savonius is drag-based, thus yoyo may be better described as drag based. Its not so important to me that the drag term is confusing, of course the blades are producing both lift and drag, as they also would for a Darrieus turbine. By googling it seems to me also that some consider a darrieus turbine a lift device or even a «lift and drag» device. So maybe it is not even clear in a classical sense, I dont know.
If we were to decide new terminology, i would suggest downwind and stationary type windmills. But its better to stick to the established terms.
As Loyd got it wrong, the opposite convention he introduced is so confusing that it doesnt make sense to me to keep repeating it.
1 Like
I think a Savonius wind turbine has blades harnessing wind energy by moving downwind, but the whole device is stationary, unlike the flying body of a yo-yo AWES.
I use swept area and blade or wing motion as criteria, not as categories as such.
Basically I agree, except that the wind turbines do not move.
Indeed Loyd’s paper uses “lift” for something like “pull”: nothing to do with lift-based or drag-based turbines as used in established wind terminology. But his paper and the following publications are logically built on this non-aligned terminology. Loyd has not cared about the Betz limit, which was out of reach. It would be difficult if even possible to correct the whole.
It is the reason why I think with AWES the notions of stationary swept area (stationary AWES) and downwind swept area (downwind AWES) could be introduced as a first referential for the wings or blades. The wings (or blades) can be lift-based or drag-based in a stationary referential (wind turbines and some AWES) or downwind referential (yo-yo AWES).
By this it could be possible to keep the used terms of lift and drag in current wind, having a similar (not exactly the same because the whole turbine is concerned) sense as lift and drag for the wings or blades of AWES.
Thus Kitemill would be classified like Guangdong parachute, in spite of being different. I see Kitemill as a lift-based kite in a downwind referential, and the Guangdong parachute as a drag-based kite also in a downwind referential.
An AWES flies, unlike a traditional wind turbine. It is a huge difference which leads to referential changes.
Yes, so it actually brings the question; how useful is this classification?
I don’t see any. Is a classification of interest to “real” wind power people? I highly doubt it.
I agree.
I have never heard of a Darrieus being called a drag device. The tip speed ratio is usually about 4 - faster than the wind speed. Most often it is lumped in with a regular horizontal-axis machines, as a “lift device”. Since the blades are traveling much faster than the wind, there is no opportunity for the wind to ever “drag” the working surfaces downwind.
Maybe also suggesting that «old wind» has its share of idiots as well?
So you are suggesting that we use a convention «lift» and «drag» based on whether the blades are predominantly producing lift of drag?
Maybe then it would be useful to have two distinct classifications
- lift vs drag type
- stationary vs downwind type
lift+stationary: Makani/Daisy
lift+downwind: Kitemill
Drag+stationary: [unexplored opportunity, non AWE Savonius]
Drag+downwind: Guangdong
Keep the classification simple
Classify the energy conversion and energy transmission class - not aero forces which are common to all devices
Tether Mechanical AWES
Aero Electrical AWES
Both types have variable elevation, positioning and swept area designs.
We can ignore the fact that one is moving downwind and one is kite looping on a set length. e.g. A Savonius Wind Turbine - is a wind turbine. One is just more shit if it’s in the same class and relies on moving downwind.
The weird thing for me of using terms - Tether Mechanical AWES and Aero Electrical AWES
Is that Daisy has shifted from one class to the other.
Ignore lift and drag as description terms until you present your model frames of reference. There’s no AWES design which doesn’t rely on both Lift and Drag
This naming is not perfect as some Tether Mechanical AWES rely to a relatively small proportion on electrical systems to improve their performance (mostly in silicon too)
I think it makes sense to think about; what is the classification for. For me, «drag» based wind power is less interesting, except the odd 100 W savonius to power a remote computer. So the classification «lift» vs «drag»is useful to make a general statement about such, eg «your design is drag based, therefore most probably not efficient enough for that scale».
The same maybe could be said about stationary vs downwind; «as your design is downwind type, you are limited doubly wrt the betz limit [4/27 vs 16/27], and I cant see that the swept area increase can justify that loss of harvestable power, compared to a stationary design»
Guangdong seems to be the odd one out, as they are compensating for being a downwind+drag device by using a lightweight wing/parachute and taking advantage of high altitude winds. I fear though that the double negative downwind+drag is too much to overcome, efficiency wise. Low efficiency plus high tether mass and sagging looks really scary to me at larger scales.
This matches my previous suggestion, although I would put stationary or downwind (swept area) in first, considering respective limits of 16/27 (Betz limit) and 4/27 (1/4 Betz limit):
By this I tried to put AWE within the whole wind field comprising regular wind turbines.
To resume:
stationary swept area: all regular lift (3 bladed HAWT and VAWT Darrieus-type) and drag (Savonius) wind turbines; and fly-gen, Daisy, Kiwee turbine, carousels for AWES;
downwind swept area: only AWES in yo-yo mode.
Examples in AWE field;
Kitemill, SkySails, KitePower: downwind lift
Guangdong: downwind drag
Makani, Daisy, carousels, SuperTurbine ™, Kiwee (turbine): stationary lift
Magenn is (was) a stationary drag AWES, working in Savonius-style.
Although from Loyd’s publication “lift” and “drag” terms are not aligned with established wind energy, I don’t think there is really a problem, as Betz limit was not initially considered because it was out of reach.
That said if an aligned terminology could lead to more fruitful AWE researches, why not?
1 Like
True, but some AWES (crosswind, Daisy) use mainly lift, while some other AWES (Guangdong parachute, Magenn) use mainly drag . Lift devices are more efficient but some advantages (simplicity, higher elevation angle) could perhaps come from drag devices.
This important distinction is found in established wind energy with lift devices (3-bladed HAWT, VAWT in Darrieus-type), and drag devices (Savonius-type). Lift devices are far more efficient.
It’s no surprise AWES has lift and drag all mixed up.
They’re at an elevation angle.
Wing lift has a drag downwind component.
Do you get lift and drag type helicopters? Hope not.
A rotor at any angle to the local wind has an upwind an downwind side
1 Like
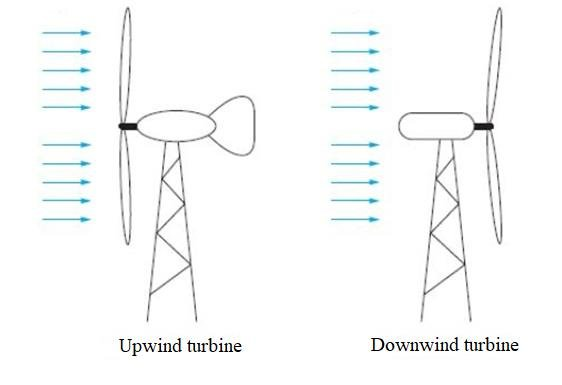
Hi Pierre: The term “downwind” (and upwind) are also already taken in wind energy.
It refers to the placement of the working surfaces, upwind of the base station or downwind of the base station.
Regular horizontal-axis propeller-style wind turbines with the rotor located downwind of the tower are referred to as “Downwind” designs. The stated advantage is usually passive automatic aim, whereas the disadvantage is often the “whack” that afflicts the blades as they transit the “wind shadow” of the tower.
So by established nomenclature, most AWE concepts, including SuperTurbine™, would be called “downwind”.
The advantage of “upwind” designs, which encompasses most utility-scale devices, is smoother airflow through the rotor, due to being placed in fresh wind, upwind of the tower.
“Upwind” and “Downwind” are two major existing categories of wind turbine nomenclature, after
“Lift-based” and “Drag-based”.
Next you have the method of overspeed protection:
“Pitch controlled”, “Stall-controlled” or “furling”
![]()
stationary and drifting then?
Stationary and leeward?
Why not? Or stationary and drifting leeward?
@dougselsam is a NOOB na na na na na nah
Nobody puts the blades downwind on a good HAWT bro
and he called it a propeller
Yeah OK only teasing
sorry @dougselsam
Stationary is a no go. red line. no stationary device.
Fixed tether length
Continuously varied tether length
The tether length of fly-gens varies when the device is in operation or not. So “tether length” does not look to be a valid criteria.
«Drifting» and «non-drifting» then.
Thats the ways wording for opposite things is mostly done in software.
—
Maybe «drifting» and «parked» could work as well.