I have though about this a lot it is the holy grail of AWE, solved…
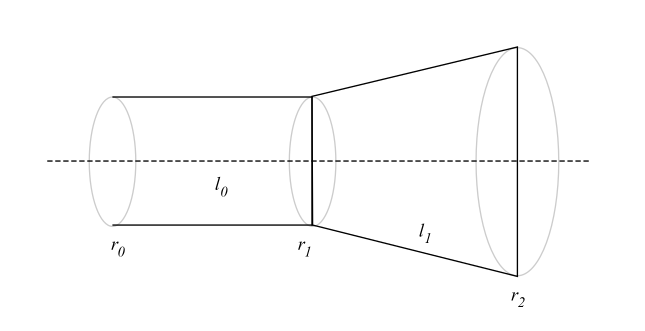
Combining Yoyo and “The Pyramid” or some similar designs maintains easy kite control, constant forward speed in the loop, even if kite scale means kite mass increases disproportionally relative to kite area. It also removes the limitation that you must limit shaft length to get the appropriate “lambda” factor (to get enough power/moment transferred through the tether shaft).
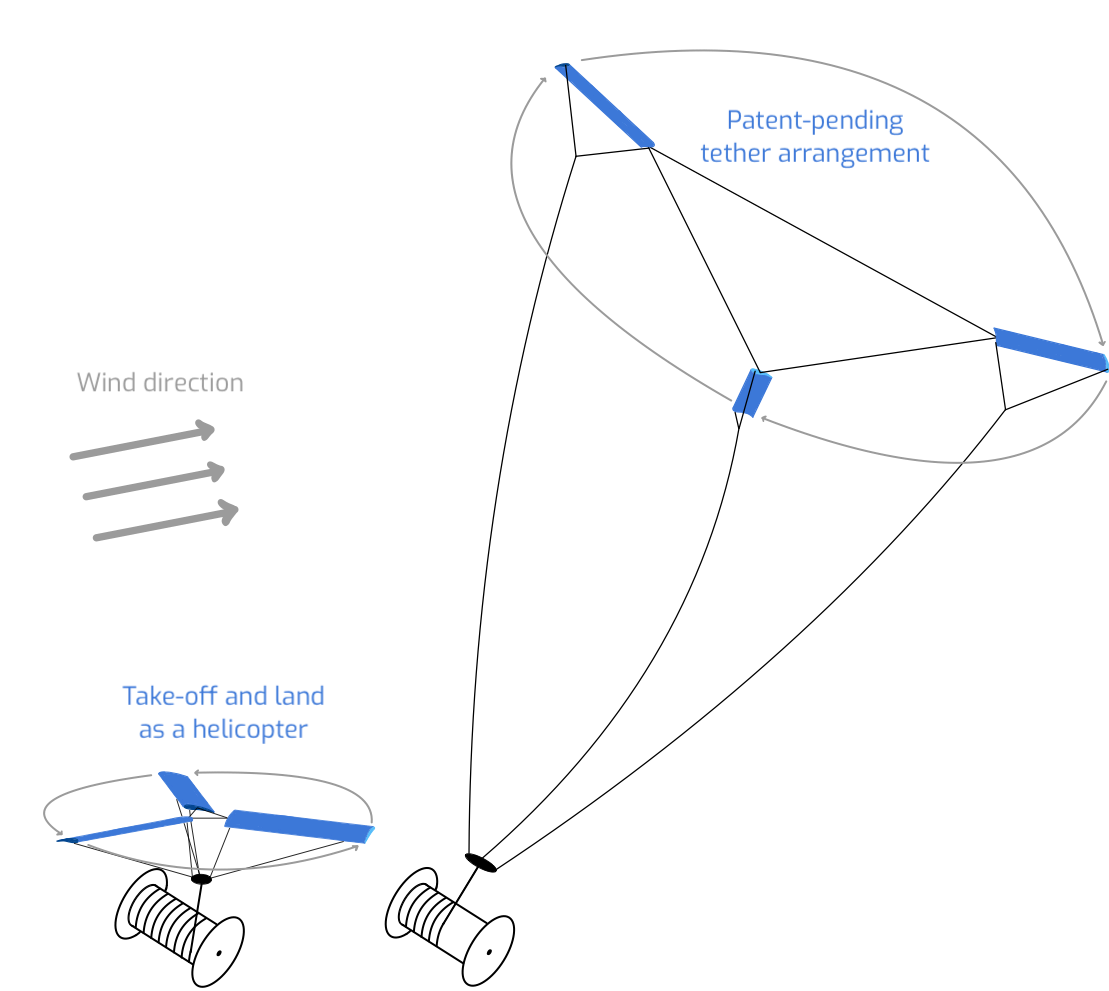
Simply use the TRPT mode to launch the kites and get them to altitude, then once at altitude change to bounding production mode (yoyo), then land in TRPT mode when the wind dies.
I don’t much like the way they drew the way the tethers are combined to one on the web page. I believe the three tethers should all be brought down to the cartwheel one by one. I don’t see right now how the drawn design could be made safe in a very low MTBF (mean time between failures) kind of thinking.
Also I don’t think twisting the tether is a good plan. A tether is a tensile structure, not a swivel. And a swivel could never be implemented on a tether without a motor, we don’t want to go there.
I mentioned a concept of “trousers” in my “The Pyramid” document that solves tether drag for bounding AWE without all these new problems.
I would also add that I don’t think a fixed roll bridle will work as shown on the sketch from AlphAnemo. The roll angle must change synchronically to keep the shaft elevated. Otherwise you will be very dependent on a lot of shaft tension. They may be planning a rolling bridle which is probably fine though. And the triangular bridle fastened at the main tether not at the wingtip is probably also a good idea. I don’t think these design decisions are terribly important at this stage though, because any group working on this would probably converge to a optimum design given enough time.
It seems they are closer aligned with my thoughts on their video from their prototype, where the tether and bridles seem to be fastened on a tether attachment structure under the wings.
