Airborne Wind Energy rethought.
1 Like
Im very exited to see someone pursue a structure similar to «The Pyramid».
Wish them best of luck! It does seem they are off to a flying start.
1 Like
What do you think of the use in reeling mode (yo-yo) that seems to appear in the figure, page technology?
I have though about this a lot it is the holy grail of AWE, solved…
Combining Yoyo and “The Pyramid” or some similar designs maintains easy kite control, constant forward speed in the loop, even if kite scale means kite mass increases disproportionally relative to kite area. It also removes the limitation that you must limit shaft length to get the appropriate “lambda” factor (to get enough power/moment transferred through the tether shaft).
Simply use the TRPT mode to launch the kites and get them to altitude, then once at altitude change to bounding production mode (yoyo), then land in TRPT mode when the wind dies.
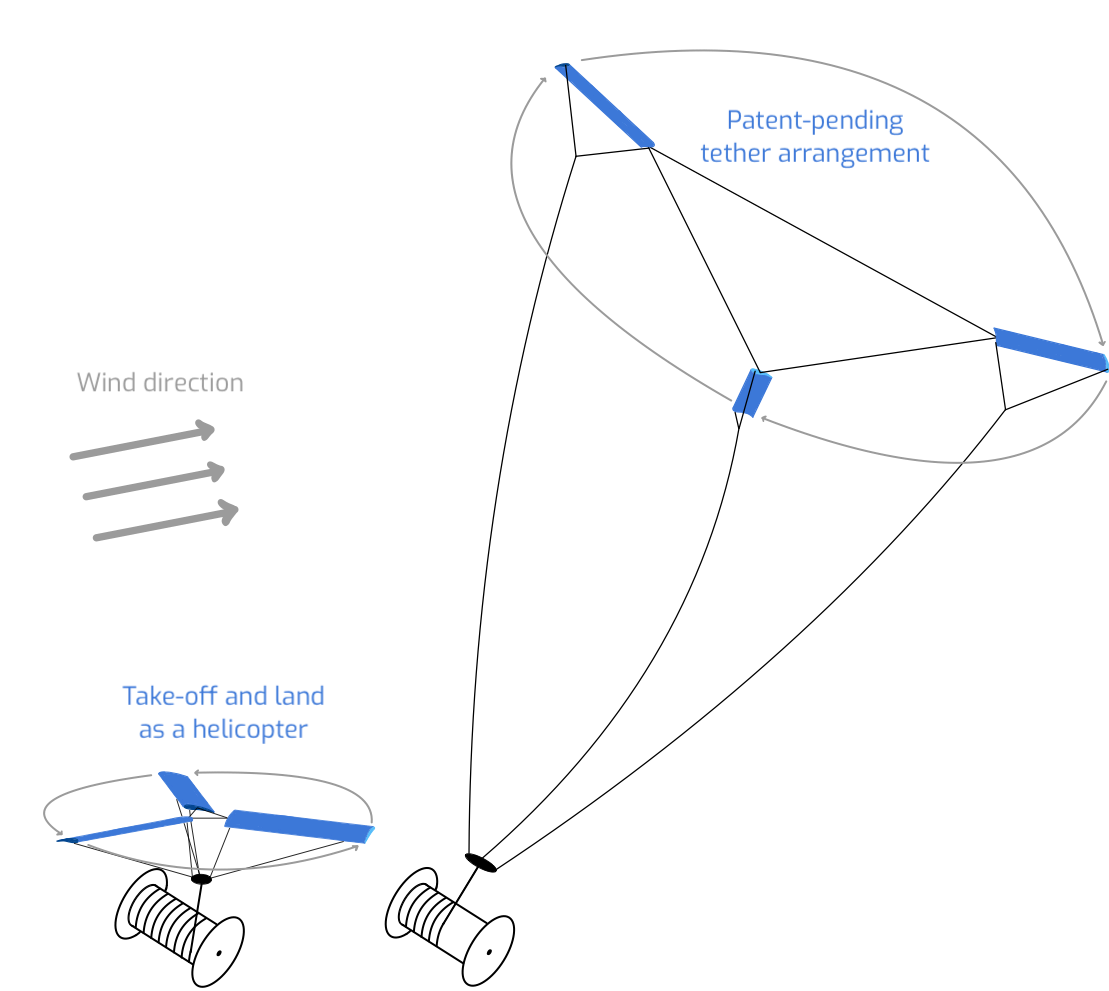
I don’t much like the way they drew the way the tethers are combined to one on the web page. I believe the three tethers should all be brought down to the cartwheel one by one. I don’t see right now how the drawn design could be made safe in a very low MTBF (mean time between failures) kind of thinking.
Also I don’t think twisting the tether is a good plan. A tether is a tensile structure, not a swivel. And a swivel could never be implemented on a tether without a motor, we don’t want to go there.
I mentioned a concept of “trousers” in my “The Pyramid” document that solves tether drag for bounding AWE without all these new problems.
I would also add that I don’t think a fixed roll bridle will work as shown on the sketch from AlphAnemo. The roll angle must change synchronically to keep the shaft elevated. Otherwise you will be very dependent on a lot of shaft tension. They may be planning a rolling bridle which is probably fine though. And the triangular bridle fastened at the main tether not at the wingtip is probably also a good idea. I don’t think these design decisions are terribly important at this stage though, because any group working on this would probably converge to a optimum design given enough time.
It seems they are closer aligned with my thoughts on their video from their prototype, where the tether and bridles seem to be fastened on a tether attachment structure under the wings.

1 Like
I like your point about a swivel at the point the single yoyo tether becomes a tri-tether …
Where there is a risk of lines twisting the tri-tether set above this point.
My thought on that is … twisting might not be disastrous if it can be removed.
It wouldn’t require a lot of torque from a vaned motorised swivel to remove that line twist.
Also
With long enough tri-tether, they can over twist and not cause huge amounts of friction / heat in the tri-tether set.
1 Like
With OKE we saw a winch arrangement allowing to rotate tethers without tangling them, with the possibility to change their common length by winding or unwinding them, just like yo-yo systems. But reel-out power phase and rotation in the same time looks difficult if it is possible. I don’t see how the swivel can be avoided. Do you think the three winches (with their hundreds of meters of respective tethers) should rotate with the cartwheel during the power phases?
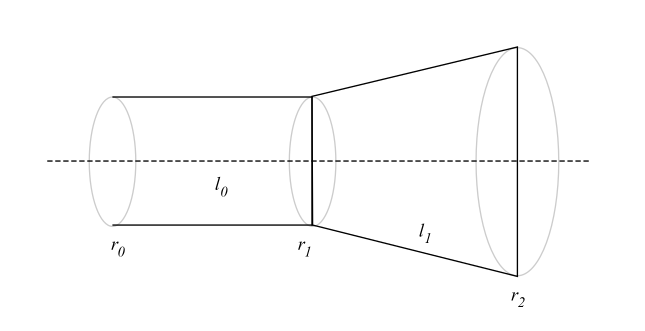
I would think with «The Pyramid» rotating the base, winches and all is mor or less given. The tethers could maybe be arranged in a way that all three eventually were pulli g a common generator? I haven’t given the details much thought. But I do see something like that as a more likely way to get to higher altitude winds. The triangular bridle is what enables the kites to perform well at high altitude. It allows more
mass, which means bigger kites which means longer tethers (everything at max scale). But TRPT like operation is necessary to launch and land.
TRPT could not go to very high altitude in «The Pyramid» configurations because that would not give the shaft enough energy transfer capability (long and slim shaft).
The addition of winches and such remain a practical design challenge, once the remaining design has been outlined. But I see those as less of a challenge than other AWE designs out there. In particular, we may note that all of this is mounted on the ground, not airborne.
1 Like
Yeah - definitely don’t want to avoid having a swivel at the point the single line becomes a 3 line system - to avoid twisting the single line.
What I proposed (I may not have been clear) was potentially adding a small motor at the swivel point.
The swivel has to allow the 3 lines to rotate smoothly without imparting torque to the single tether, whilst also rigidly pulling all that axial load for yo-yo… That’s quite tough.
So maybe a wee motor to drive the topside of the swivel (3 lines) with respect to the single line. And only in the circumstances where that may be necessary e.g. after an over-twist… (Over-twist Happens - all TRPT users need that bumper sticker)
To avoid likelihood of over-twist - they could use a basket / funnel type arrangement
e.g.
if the single line is terminated inside and connects into the pointy end of the funnel.
Higher up the funnel shape / basket structure there is a thrust bearing
Allowing the wider diameter topside of the funnel shape / basket structure to rotate more freely whilst resisting axial load of the 3(+) tethers
I reckon that’d help
Also I suggest maybe having vanes which align to prevent twist of the single tether e.g. if the basket is not being driven - impart rotation torque to the single tether axis in the counter rotary direction
or if it is being driven - force from the vanes in the similar rotary direction will allow a motor to assist the rotation of the 3(+) tether topside
1 Like
What do you think about RotoKite and about how the swivel block could work? The control issue does not seem to be solved. Perhaps a tether arrangement between the kites could allow them to spread out to cover a larger wind area while maintaining some flight cohesion.
")
twin kite is more susceptible to wobble/tangle than a 3(+) blade rotor with separated blades connected by a polygon bridle rotor bridle
blades on the twin blade rotor can advance without pulling the rest of the rotor around
this creates imbalance and jerky flight
There are many things about this arrangement that I don’t particularily like:
- swivel on tether
- bending of kites when retracting
- there is no distance between the kites
- looks like very closely linked to inflatable kites
I don’t believe this arrangement i possible to build to work reliably. If that was done nevertheless, I don’t think there is any business proposition in here.
A sharp contrast to AlphAnemo which I believe are onto something.
1 Like
From the website (Technology):
Our patent-pending centrifugally-stiffened three-wing design unlocks an entirely new mode of operation for Airborne Wind Energy.
Centrifugally Stiffened Rotor (CSR) as a model for an AWES? is not new as such. I think (before Mark D. Moore) Billy Roeseler developped something resembling a CSR, calling it:
THE EFFECT OF RIBBON ROTOR GEOMETRY ON BLADE RESPONSE AND STABILITY
Concerning scalability I see a possible issue as the centrifugal force decreases when the diameter of the rotor increases. That said bank angle is also a mean to favor rotor expansion:
As presented in the sketch, it seems that each blade pitch is controlled cyclically by the respective tether that descends towards the intersection. Controlling the blades this way while ensuring an expansion that allows for tensioning the triangular tether arrangement should be something very difficult but not impossible.
Really impressed that there are opportunities for students …
We offer student projects at ETH Zürich to highly-skilled and motivated students who care about a purposeful field of research.
Current projects (from September):
- Modeling a tri-winged airborne wind turbine, A data-driven approach
- Modeling a tri-winged airborne wind turbine, First principles
- Disturbance rejection for a tri-winged airborne wind turbine
- Regulatory framework for airborne wind energy systems
And who doesn’t love a cheap 1st bash cardboard, tape & desk prototype

Very cool
Talking of cool… I reckon that’s a scratch map on the wall behind… I hope they get to deploy on Antarctica (still not been scratched off yet)
1 Like
Hardware is HARD
. It takes many iterations just to get something to work once:hammer_and_wrench:. At alphAnemo, our vision is that every engineer should embrace this reality, such that we can build reliable, long lasting products
.
This is why we have spent the last few months designing a desktop-size version of our turbine
. It will allow us to
test new software with hardware in the loop and avoid crashing expensive systems,
explore and validate scaling laws very early on, and
demonstrate and show the technology at meetings and events.
We are still missing lateral tether actuation, the system is currently at the limit in terms of weight
. Operating stably at this scale is incredibly hard, partly because the electronics are as heavy as everything else combined and cannot easily be scaled down
. Nevertheless, the insights from this system are already incredibly valuable for building our first kW scale demonstrator
.
Do you think this kind of hardware approach is useful in your domain, or is the future purely based on digital twins
? Let us know in the comments
.
1 Like