I would like to add a calculation related to this and Bladetips Energy design.
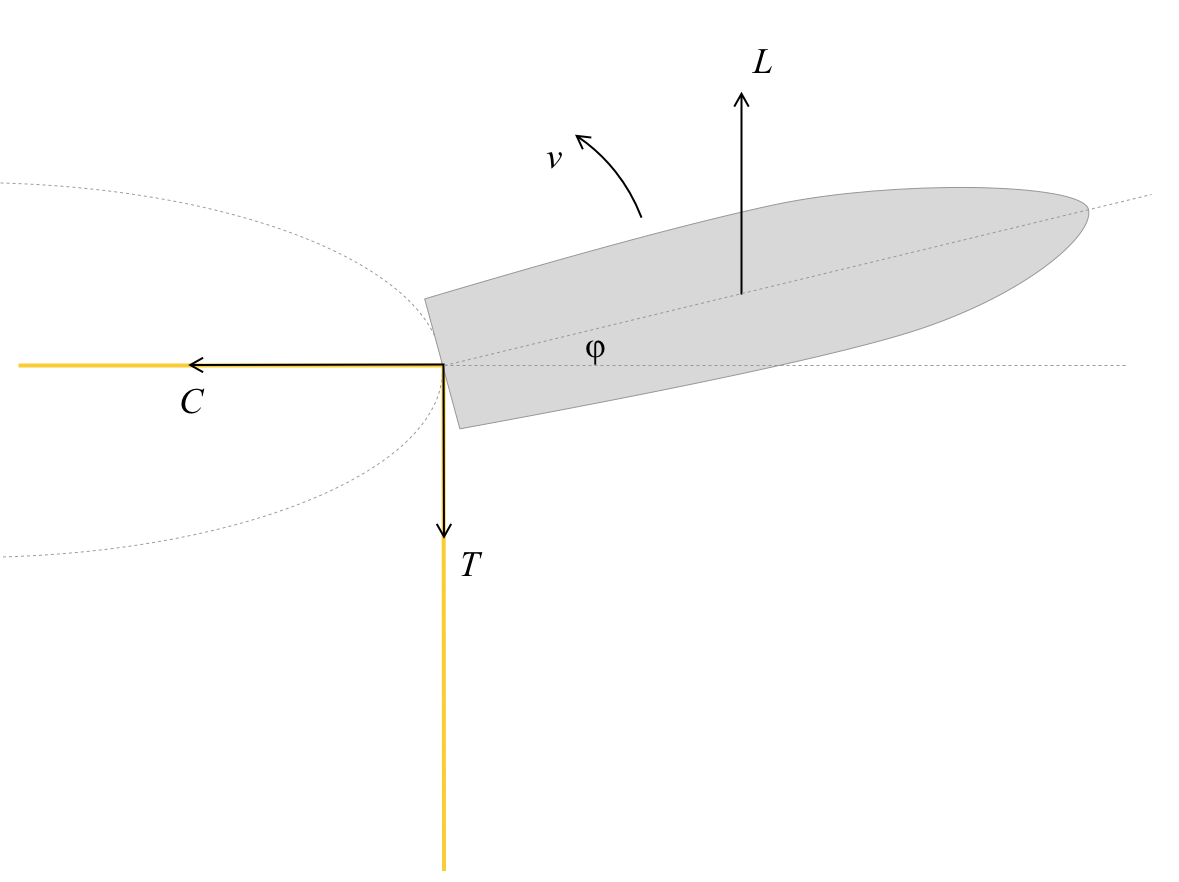
The [poor] sketch shows a rotating blade attached only at the inner end. Not shown is the looping radius R distance from center of rotation to CG [center of gravity] of the blade. C is the force towards center supported by a tether. T is the tether force going to the ground, perpendicular to the plane of rotation. Note T and C may be a bridle going somewhere in between these, but the calculations should be the same. The angle \phi is the “cone” angle; how much the blade must rotate in order to maintain balance of moments. We assume \phi is small for now. The mass of the blade is m. The blade is moving at speed v. I also assume the effect of gravity is much smaller than other forces involved here, and so it is neglected.
The force T is the one used to generate energy, as this is a bounding type AWE system with pulling energy transfer. C is balanced by other blades also rotating.
As \phi is small, we can assume T \approx L.
Balance of force due to rotation gives us C = m \frac{v^2}{R}
Lift of the wing is L = \frac{1}{2} \rho v^2 C_L S (including here density of air, lift coefficient and surface area of the wing)
The interesting part here is the balance of moments that decides the angle \phi. We have
C \sin \phi = T cos \phi
\tan \phi = \frac{T}{C}
\tan \phi = \frac{\frac{1}{2} \rho v^2 C_L S}{m \frac{v^2}{R}}
\tan \phi = \frac{ \rho C_L S R}{2 m}
At this point, we could make an assumed angle for an imagined wing with mass 15 kg, span 7 m, area 3 m2, looping radius 20 m, C_L of 1.5 and \rho 1.225. This yields
\phi \approx 75^\circ
So this is just not feasible. The thing here is you need the mass to be as big as possible to generate centrifugal forces, but this is at odds with general AWE goals. So it is a bad idea it seems to me. The other way to lower the angle \phi is to reduce the looping radius. This leads to aerodynamical problems, as the inner part of the blade will be moving more slowly. Anyways, the lowest angle I get is 32^\circ which is still very high. Note the assumtion of small \phi does not hold.
Anyways, lets see how this scales. We will assume every dimension scaled by x. Wing area scales by x^2 and mass by x^3. The angle of the scaled wing would be
\tan \phi_x = \frac{ \rho C_L \left(x^2 S\right) \left(x R\right)}{2 \left(x^3 m\right)}
\tan \phi_x = \frac{ \rho C_L S R}{2 m}
We see that the tilt angle of the blade does not change with scale, so going bigger or smaller will not help the situation.
So hereby I claim the method of attaching the blades at only one end for AWE DEBUNKED, at least for the way I understand it should be implemented.
Lets just fasten the tether for T somewhere close to center of lift…