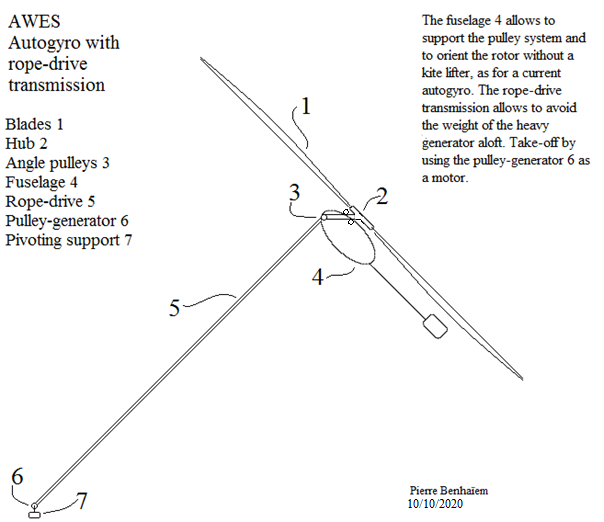
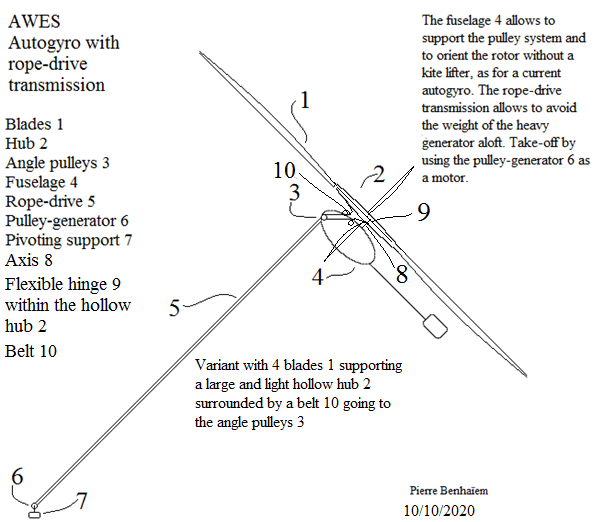
I think that an autogyro wind turbine with a rope-drive of the same type as for @Kitewinder’ Kiwee could possibly be interesting, allowing to do without the kite lifter, allowing also preventing too heavy or fragile in flight generators.
The light fuselage serves also as a support for the fixed parts of the angle pulleys. Take-off could be ensured with the generator as the motor and a small belt specially designed for this purpose. Some sketches are below:
I very much doubt that an autogyro system can successfully be use for AWE. The cosine cubed losses are substantial and a good portion of the rotational force will be used for lifting the device instead of generating power. I have many questions about your proposed system.
• How do you launch the autogyro? The cable drive must be fully extended or it will not operate. Alternately a system of idler pulleys must be installed to adjust the length of the cable drive.
• How do you land the autogyro?
• How do you automate the system so that it can be reliably launched and landed without supervision?
• How do you maintain tension in the cable when you first apply power to the rotor and start turning it? If the tension in the return line drops to zero then the rope will slip or the rope will wind up around the drive pulley.
• How do you adjust the angle of the autogyro to obtain maximum power?
• Unless the counterweight on the fuselage is large, adding to the weight of the system, the whole device might rotate about the tether axis causing the ropes in the rope drive to twist and render the rope drive inoperable.
• Is the rope drive one continuous serpentine loop or are there auxiliary belts in the system?
• Is the rope drive horizontal (drive and return ropes side by side)?
As for almost all AWE systems comprising crosswind AWES and other tilted rotating devices like Daisy, except for those comprising a not tilted turbine (HAWT) supported by a lifter kite of type Kiwee where a large additional lift force is required, so a large lifter kite in order to compensate the drag and the lack of lift of the HAWT. All AWES loss some efficiency due to the force required to fly.
The tension thanks to the lift force interacts against the twist of the rope-drive, but it is a point to be clarified. There is no problem with Kiwee but it uses a large lifter kite compared to the turbine (HAWT). If there is a problem with an autogyro some smaller lifter kite could be added.
I put again the passages replying to some of your questions:
For the rest the only real way to see if it is feasible is to build a prototype, as with any AWE system.