Has anyone seen a drone concept similar to this?
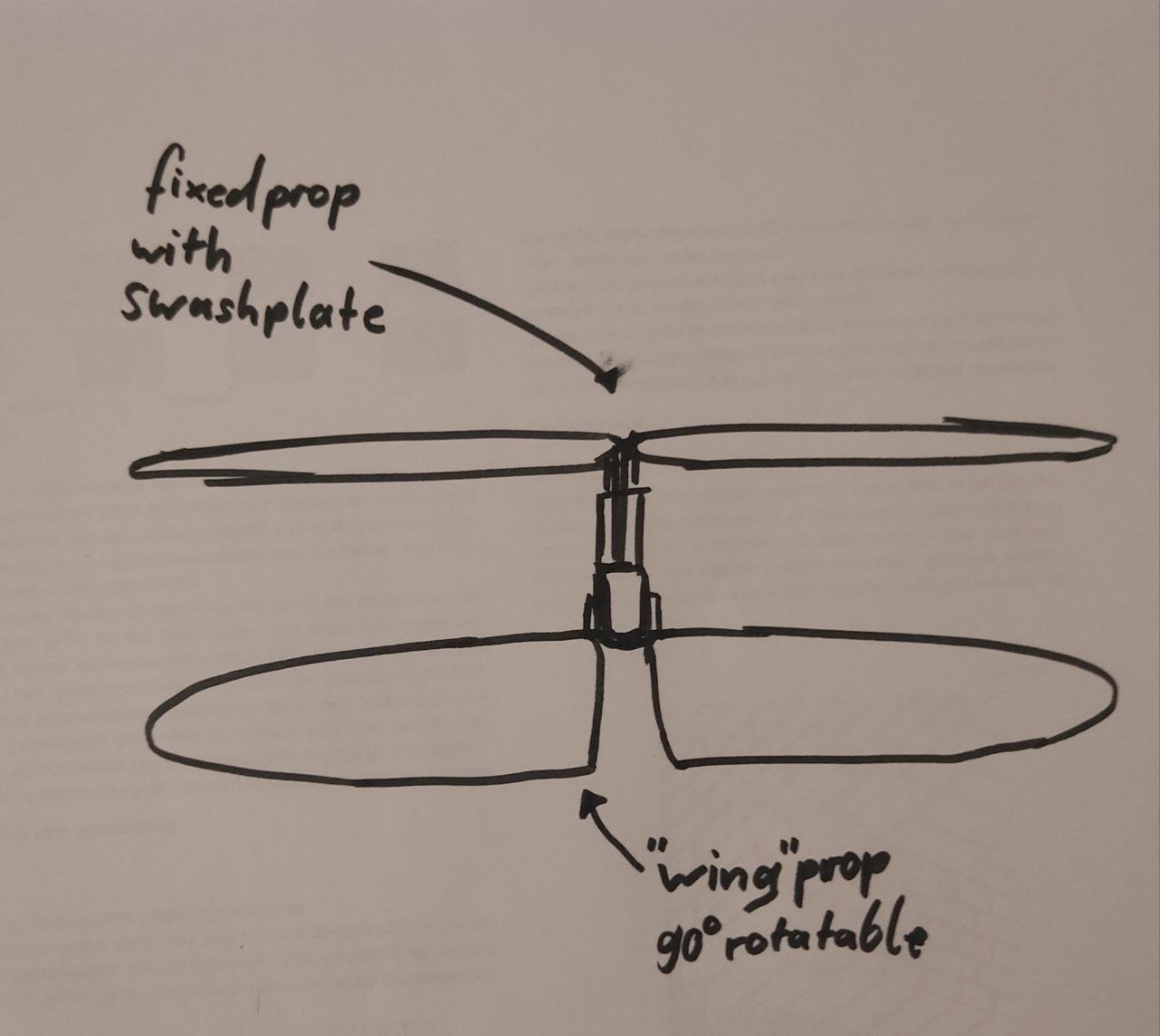
I’m imagining a drone that has a helicopter rotor, which is not counteracted, but the whole rest of the drone starts rotating. The lower propeller / wing blades can rotate so that it basically becomes counterrotating props. It could then transition towards forward flight and use the lower wings for regular lift (angled so that rotation is counteracted). It might also have a power generation mode with a tether.
I’m imagining it would be light and have large blades that rotate slowly for energy efficient station keeping / loitering.
1 Like
You are really on a roll with fresh ideas these days (thinking about the anchored drone)
I think this is a very interesting and potentially useful idea.
I think it could work. Whether it is a better option than a quad or helicopter style tail is really hard to tell.
So if i understand it right you basically have two props with a motored shaft between. There are many variations like «fast top slow under» or «fixed pitch top variable pitch under» to make the design minimal or maybe redundant.
I also see an option of adding a third layer to the «birthday cake» to have the middle section stationary.
I do see some problems also; the bottom diameter should probably be either less than or much bigger than the top diameter. Otherwise the prop flow will be very irregular. Also it is hard to make the bottom layer lift very much, as it is placed in the downward flow of the top prop.
My immediate thought is maybe what are we gaining relative to other designs. If that question could be answered well, this idea would gain value in my opinion
No I havent seen anything similar, though I am not really the one to explore fringe designs broadly
1 Like
I believe you want to use different numbers of blades but this could be a problem in forward flight.
Better to fly in circles than hover regardless so perhaps simply optimize forward flight.
3 Likes
You’re absolutely right. Flying in cirles is better for low energy loitering.