Edit: started out with the wrong mass per meter. Adjusted from 18 kg to 5 kg. Updated plots
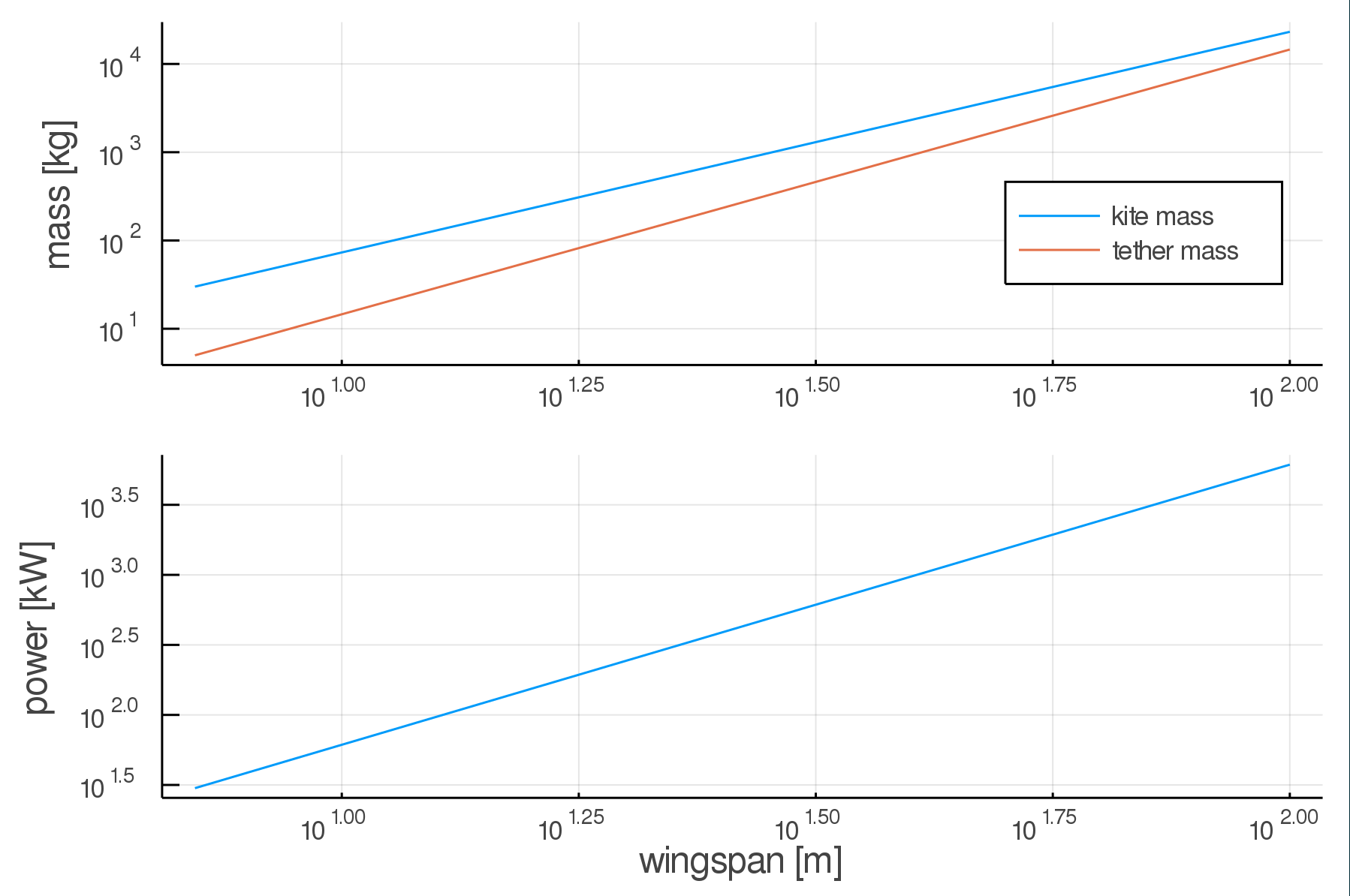
I’d like to discuss this. For a wingspan b we may scale out AWE rig into a bigger one with wingspan x b. By doing so, power scales by x^2 as lift depends on wing area. Tether diameter must scale by x to acomodate the increased pull force of the kite. The kite mass will scale somewhere in the range x^2 \lt x^y \lt x^3, I’ll assume y \approx 2.5.
These things should be fairly well known for AWE.
Furthermore, I state that tether length should scale by x. This ensures that the flight characteristics are preserved and also preserves the geometry of flight. I will not show why I believe so here, just state it as an assumption.
The mass of the tether must be lifted by the kite. A tether of 400 meter 4 mm weighs approx 5 kg. This would be suitable for a 30 kW rigid kite (I think rigid vs soft does not matter in this case, but feel free to comment on this).
We stated that y is 2.5 rather than pure cubic scaling because in designing a structure, some things could be easier with larger scale (eg, the distance between the top and bottom of an I-beam increases, as seen on https://www.amesweb.info/SectionalPropertiesTabs/SectionalPropertiesIbeam.aspx). Scaling of a kite must scale both beam structures and skin structures, and finding a simple equation for this is not easy.
The mass of the tether though is quite straightforward to calculate, and it scales cubic by x^3. There is really no way to get around this. Hence I am thinking that the weight of the tether could be the ultimate scaling limit for AWE.
I have added a simple plot for reference. It is just meant as an illustration, not based on an accurate calculation.
The conclusion to this would be that if you want to go bigger than current HAWT (in power output), you may have to focus on designs with relatively shorter tethers.
Another conclusion would be that conductive tethers and flygen are at a big disadvantage.
A third conclusion would be that TRPT is looking better than ever 