Ignorant question probably. I’m having a hard time visualizing this.
If you’re flying a power kite in circles, you can imagine the path it describes as a cone that has the path of the kite as its base, and your hands as the tip. It think the kite line would be perpendicular to this base.
What now happens if you hold a stick in your hand and attach the kite line to that? What angles do the stick and the line make as you increase the resistance (them starting out as in line)? What maximum angle do they make if you’re trying to maximize torque transfer? Is the kite line still perpendicular to the base of the cone? Does the cone change its shape? What effects do the lengths of the line and stick have? Are there any formulas or papers or videos?
I imagine the moment is a function of the angle of the kite (angle in plane of rotation) minus the angle of the stick (rotation similarily in a parallel plane). The maximum torque increases first to a maximum, then decreases once, when the angle difference increases.
If the moment applied by the stick reduces the speed og the kite, there is an angle difference to optimize energy output.
I imagine this is more or less how rotary kite rigs are built?
Disclaimer: maybe I did not understand the question
It seems to me that the most important factor is to orient the kite to face the effective wind direction. In this way we minimize cosine cubed losses. Small angles will hardly affect this phenomenon. A much bigger effect is the elevation of the kite at the bottom and top of the circle. Cosine cubed losses are minimized at the bottom and maximized at the top. There is some gain in performance because of slightly higher winds at the top, but I think that cosine cubed losses predominate.
With a single long line it’s going to be very hard to impart torque to the stick.
Even a pair of lines, or several lines, there will hardly be any torque transfer.
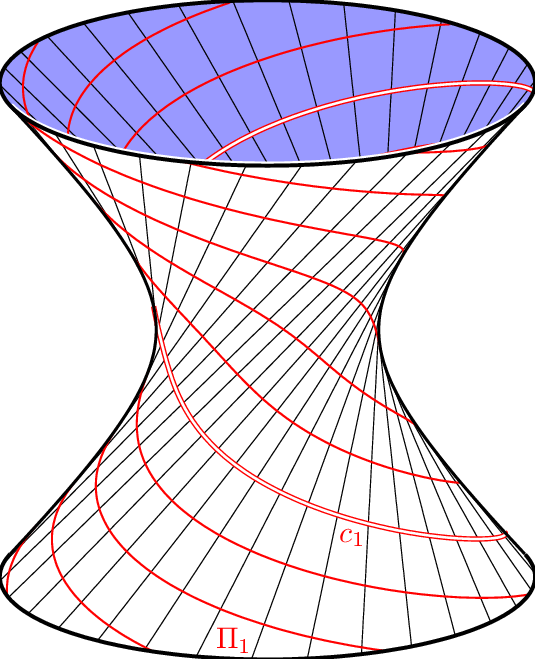
The lines will naturally form a collective hyperboloid … which will pinch ever tighter in the middle until collapse at the waist at 180deg rotation
Like this image
Ideally you would be able to hold infinite tension on the line, and partially resist planar rotation.
Then the lines wouldn’t collapse.
However, What I’ve worked on is keeping the set of lines separated by adding rings or n lines polygons between the lines… Doing this you can achieve torque transfer between the rings and all the way to the ground station avoiding the over twist.
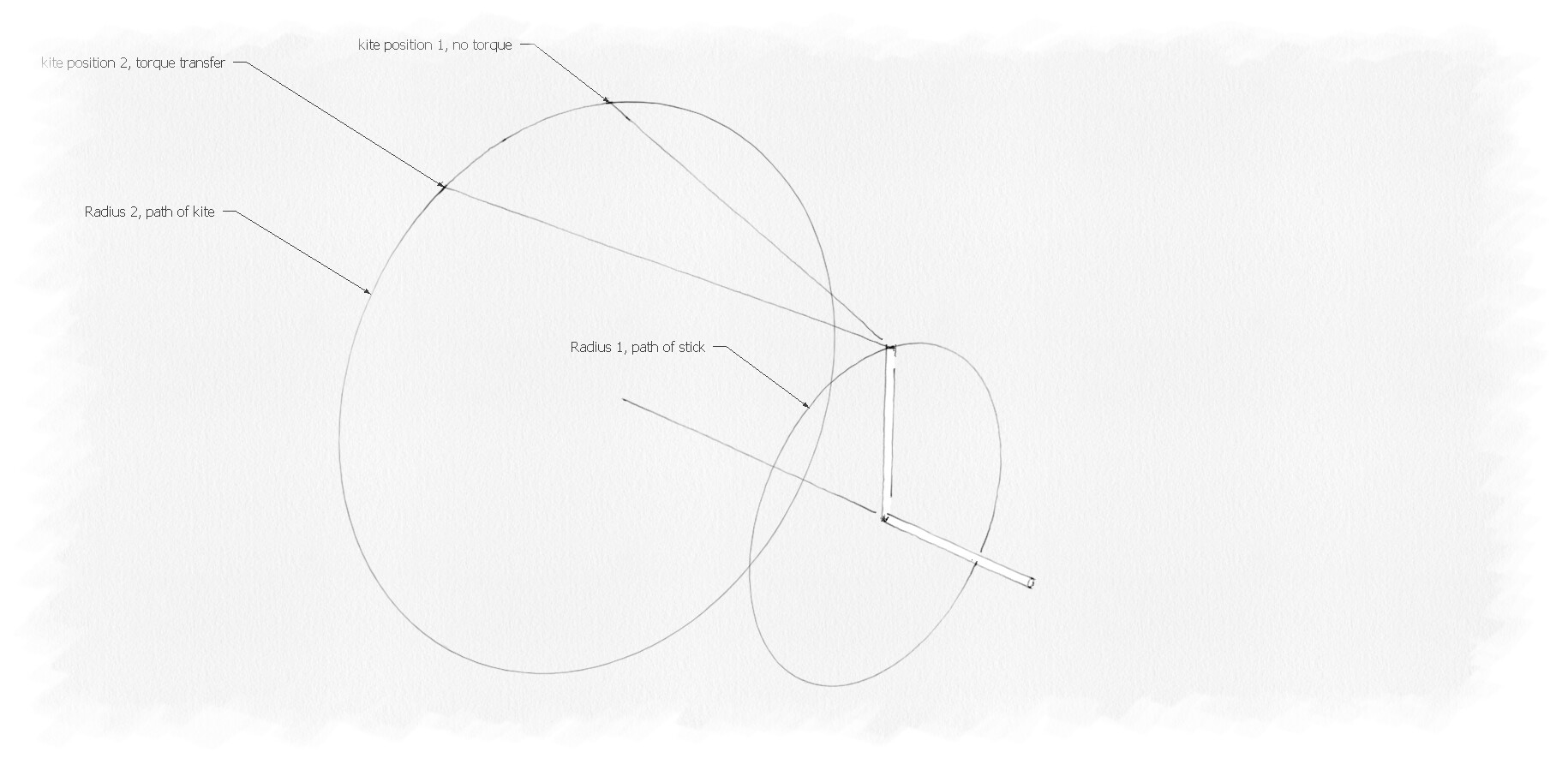
Edit: Yes I’m drawing a circumference and calling it a radius there.
All is well when there is no torque transfer. The stick and the kite are in the same relative position on their circles and the kite is flying inside the wind window. The more the stick resists the rotation, the greater the angle between the stick and the line and so the worse the position of the kite seems to get in the wind window. But that assumes I think a two line kite. If you use a four line kite things change maybe. Maybe you can then keep the kite orientated better to the wind even if your lines are not.
So there seems to be a trade-off. If there is no angle difference between the kite and the stick your kite is moving fastest because it is sitting in the wind window, but you don’t have any moment to move the stick. If there is a 90 degree difference between the stick and the line, your potential moment is greatest, but your kite is outside of the wind window, so can’t exert any force.
So you have several variables you can play with, length of the stick, length of the line, shape of the cone the kite makes, angle difference between stick and line (or how much you are slowing down the kite), orientation of the kite to the wind if you’re not using a two line kite perhaps.
I’d think you wouldn’t want to slow the kite down too much. Is that right?
Also you want radius 2 in the diagram to be significantly greater than radius 1, or else why bother. But also perhaps no too much greater:
Thanks. Maybe there is way to find the optimum or this has already been researched. I’m probably going to try to find some research but I can’t think of useful search terms.
Thanks. My question is a bit different so perhaps that changes things. It only concerns itself with the top rung from your bottom picture, with the goal of increasing its swept area. which you could then attach to anything else, like a tower or a torque transfer system like yours for example.
Your top picture is interesting. I skimmed the paper but it didn’t seem to talk about this question. I haven’t had time yet to look into it further. Do you have a suggestion on where to start?
Same. But you can’t make the cone too thin or you’re with no swept area left, so what is optimal?
Anyway. I think perhaps it is several questions: one, is it possible to move a stick by pulling on it with a rope? Experience tells us that’s a yes. And two, can you control in what directions a kite pulls? That’s also a yes. Perhaps three, is it easier to control in which direction a kite pulls with four lines or with two? Probably yes. And four, should you then use four lines? It depends.
If you were to put a camera on the end of your stick, the kite should perhaps look like it is not moving most of the time, just like when you’re kite boarding or in a kite buggy moving crosswind. That feels easier to think about so let’s think about that instead: you’re on a cart on a train track perpendicular to the wind, the cart has a brake. How much should you be braking to let the kite you’re flying impart the maximum force to you? Or put another way, to let the brakes heat up the most?
And should you be flying a two line kite or a four line kite?