Edit: replaced convex with concave
Edit: For bounding [yoyo] the tether drag of a straight tether is 1/4 of full tether drag
Hi. I think it’s fascinating that even after all these years there are still some new things to be said about AWE even using only the simplest analysis. Today I wanted to share something I have been working on related to tether drag.
So the starting point is a kite flying in a circular path. The tether may as a first approximation be regarded to be a straight cylindical body, and we can calculate the aerodynamic drag to be something like
D = \frac{1}{4} \frac{1}{2} \rho v_k^2 C_D l d
Where
\rho - density of air
v_k - forward speed of the kite
C_D - drag coefficient of the tether, usually close to 1.0
l - tether length
d - diameter of the tether
We see that the drag is a certain fraction of the drag of the tether as though all of it was travelling at the speed of the kite. We are disregarding wind here, because the kite speed v_k should ideally be higher than the wind, and the wind blowing a lot along the tether, so the drag effects caused by moving forward should dominate those caused by wind.
Also as a general thing to keep in mind - most of the drag is generated close to the kite, because drag is determined by airspeed squared. The tether is moving fast at the kite, and standing still at the ground.
Now I will make things slighty more complicated; The tether is not really straight. I have drawn a sketch
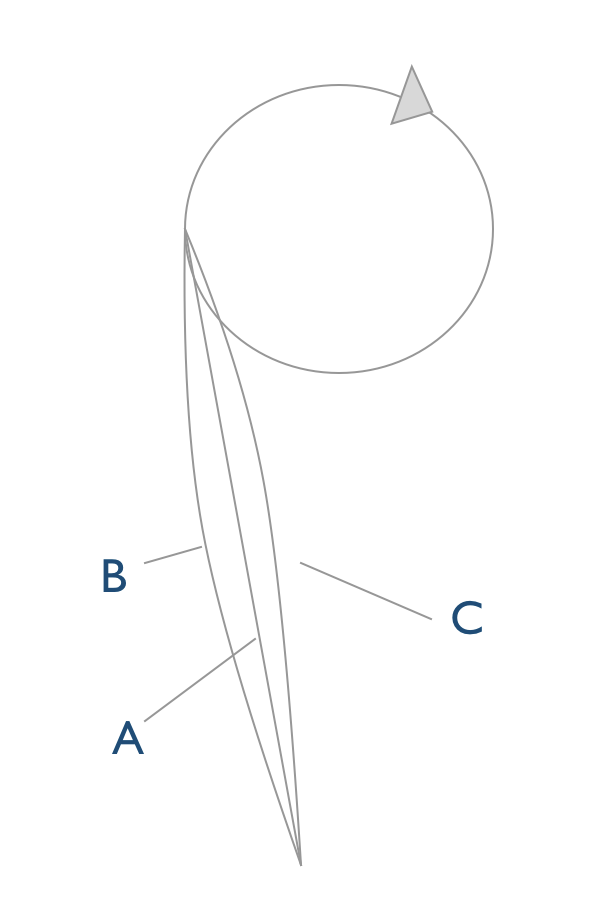
Slice.pdf (7.5 KB)
The scenario we were talking about before is labeled “A”. But the tether is long and bends easily, so it may have a “belly” like “B” in the figure, or more of a concave shape like “C”. (in addition of course to an infinite amount of more complex shapes)
If the tether has a belly, the looping radius of the tether would be larger, and thus the airspeed at the tether will increase. If we combine this information with the previous assertion that most drag is generated close to the kite, we see that even a slight amount of “belly” can increase the tether drag observed by the kite significantly. (Thought experiment, the bellying shape can be approximated by a new straight tether being much longer and tangential at the kite to the real tether. The drag would be close to that of the long straight tether)
So I have had the “goto” thinking that the reason for a belly would be the centrifugal forces on the kite. So, smaller looping radiuses, less tension and heavier tether would be the main causes for getting a belly. Also, if you scale the tether naturally (b \propto l \propto d, with b being the kite wingspan), the tether will get relatively heavier with scale and the bellying effect get more and more pronounced.
I had a poster on this subject at AWEC 2019 https://www.researchgate.net/profile/Espen-Oland/publication/336617086_THE_SECOND_MOST_IMPORTANT_LAW_OF_TETHER_SCALING/links/5da8bc5a92851c577eb7fb9f/THE-SECOND-MOST-IMPORTANT-LAW-OF-TETHER-SCALING.pdf?origin=publication_detail
My conclusion at that point was that hovering systems with conductive tether like Makani were pursuing back then was going to have tangible scaling issues because their tether mass and bellying already was an issue at the current scale.
–
Ok, that was more of a background story. The new thing is that “doh”, gravity also has a huge impact on bellying and concavity of the tether. In fact, I would like to divide the loop into four quadrants to identify the impact of tether drag and gravity, being two very important influenced on flying speed of the kite.
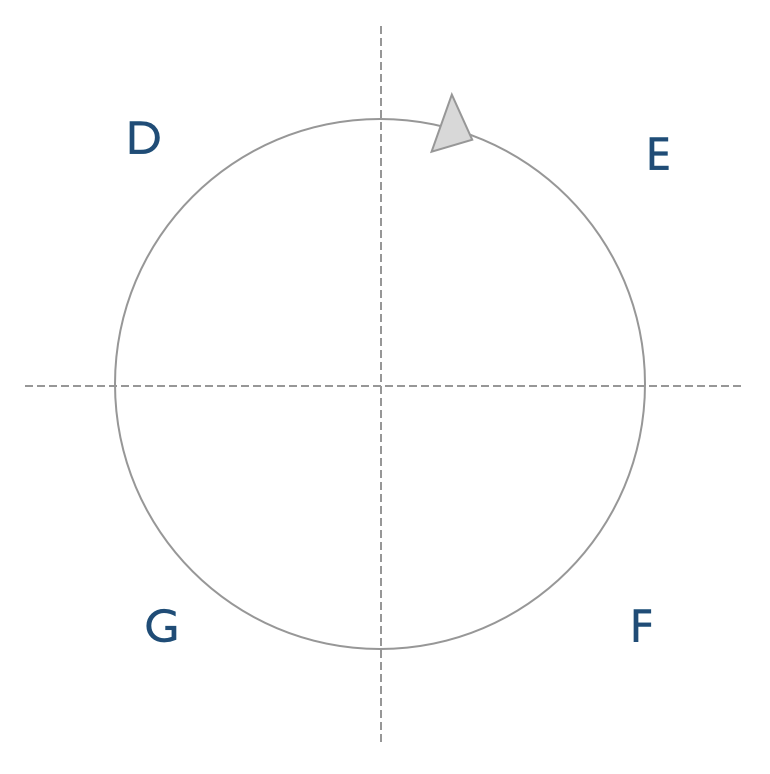
To go through each quadrant, with all effects being due to gravity:
D - Concave tether, kite slowdown
E - Concave tether, kite speedup
F - Bellying tether, kite speedup
G - Bellying tether, kite slowdown
The effect on tether bellying is variable based on tether length, mass, scale, tension etc. But I do believe the tether drag could vary to a near zero of the “straight” tether drag somewhere in quadrant D and E, and somewhere near double in the quadrants F and G.
What are the consequences? I think overall good, because you get more help in the difficult D quadrant, where gravity is slowing down the kite, but the reduction in tether drag will compensate somewhat.
Also, but to a lesser extent, the effect is helping in quadrant F and G where you may get overspeeding issues in higher winds. The tether drag will increase. Though it is never a good thing, but it is the best place it could happen.
