@Massimo posted the following interesting message on Yahoo AWE forum:
"Tether Drag doesn’t affect the wing speed or the system AE.
The reasons are quite easy to figure out:
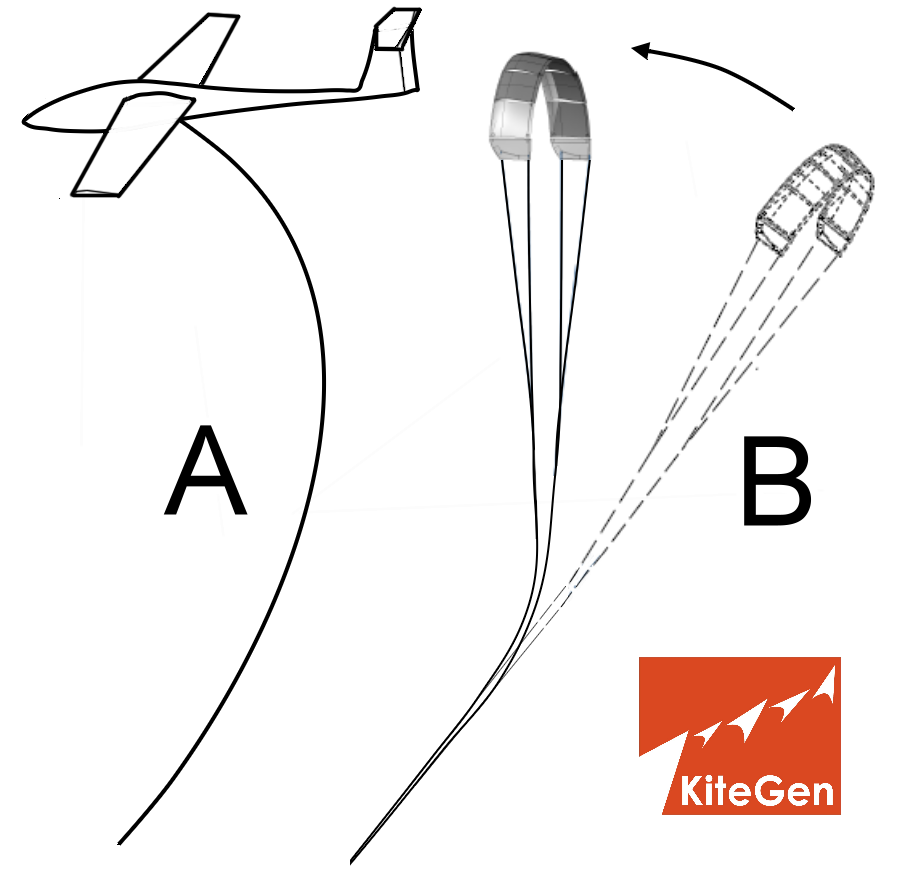
During the tests, we pushed a wing at 2400m and 65m/s observing no tether drag issues. This demonstrates KiteGen’s right to reject the overly simplistic analysis based on the “system drag” idea that combines rope and wing, which appeared for the first time in the Loyd patent, the validity of which is limited to tethered aircraft (A) equipped with a tail that drives and forces the pitch.
Thanks to in-depth research and simulation, it has been established that the drag of the rope is irrelevant to wing speed and energy production. It is, instead, simply a geometric dynamic, conceptually affecting the path in airspace only (B). Tether drag only limits the crosswind motion distance that can be achieved in one stroke, before the wing has to change direction. This is a feature that could be successfully exploited by the control in order to extend the wind power spot.
Issues related to transverse wave propagation on the rope. The wing is typically set to fly at 80 m/s. When the wing changes direction, a new displacement transverse wave acts upon the rope, while the axial wave is running at 270 m/s. Such a transverse wave is slow, due the air mass added to the rope’s linear density, taking several seconds to affect the entire rope. Thus, the wing has the freedom to fly for a few hundred meters before the rope bending will change its optimal angle toward the wind. The models adopted in literature expose an excessively tight time boundary or even a snapshot to track such behavior.
Rope drag is applied axially to the wing, the same effect that gravity has on gliders, that obviously never slows the aircraft. The force vector representing the drag of the ropes binding the wing is only manifested axially, thus thrusting the wing as with gliders. (above picture B case)
As Gustav Eiffel taught us, the Reynold number of the segment of rope near the wing reaches a high value where a new effect called the “drag crisis” takes place, greatly reducing it.
The tether drag issue is speculation based on a fixed cylinder in a flow experiment setup, with a measured coefficient ranging between 1.2 and 1.5. The ropes are light in specific weight which means they are locally free to oscillate and rotate on the axis, dynamically losing air pressure accumulation, thus they cannot be compared to a typical fixed cylinder in a flow.
Larger scales create a lessening of the significance of the issue; this due to the rope section and Reynolds surface ratio, rope section is squared function of the diametre and the drag surface is linear, an advantage that grows dramatically with increasing scale.
The scientific committee of KiteGen published an article trying to explain the limits and errors of the proposed models in the literature review, unfortunately no skilled audience.
Furthermore, in order to gain more flight freedom, KiteGen patented ropes that were appropriately tapered in order to reduce the drag coefficient to 0.03, instead of the classic 1.2 of a cylinder immersed in a fluid that the ropes are immersed in as well. This patent applies to the domain of possible and potential future enhanced optimization of the technology.
To repeat, as this is an extremely important concept, because the production of energy depends on the square of the flight speed, the drag of the ropes is not added to that of the wing, which remains free to fly at the speed of its glide factor or aerodynamic efficiency."
For me it is quite new. Thanks for your observations.