Dear fellow researchers,
I would like to invite you to check out our open access publication in the journal MDPI Data:
M. A. Rushdi, T. N. Dief, S. Yoshida, R. Schmehl: “Towing Test Data Set of the Kyushu University Kite System”. Data, Vol. 5, No. 3, 2020. doi:10.3390/data5030069
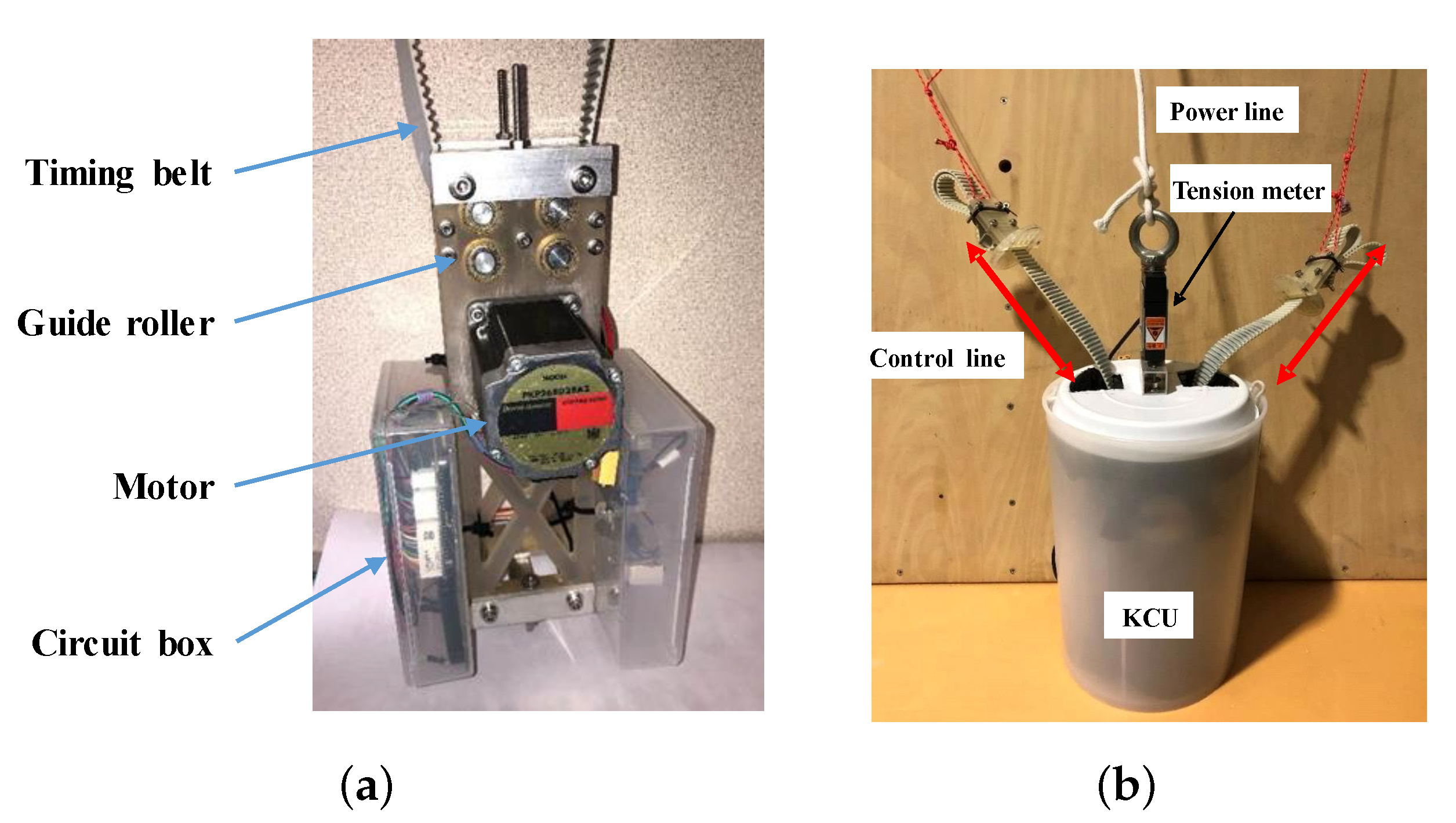
This paper describes in detail the towing tests with a kite using a suspended kite control unit (KCU), the experimental setup, the acquisition of the measurement data, etc. Results should be reproducible, and can be used for validation of physical models.
The dataset itself is available from:
M.A. Rushdi, R. Schmehl, T.N. Dief, S. Yoshida, D. Fujimoto, K. Sawano: “Towing test data of the Kyushu University kite system”. 4TU.Centre for Research Data, Dataset, 2020. doi:10.4121/uuid:c3cee766-2804-4c00-924f-8a9f6c8122fc.
A study on the use of the dataset for prediction of the tether tension using machine learning has been published here:
M. A. Rushdi, A. A. Rushdi, T. N. Dief, A. M. Halawa, S. Yoshida, R. Schmehl: “Power Prediction of Airborne Wind Energy Systems using Multivariate Machine Learning”. Energies, Vol. 13, No. 9, pp. 2367, 2020. doi:10.3390/en13092367.