Several kite and AWES designs benefit from the stability of wide spread anchors.
To cope with changes in wind direction these designs need to either adapt their anchor position or have isotropic operation capability
I was fascinated by the performance of the wee robot in this post
A field robot which can move anchors,
Or just take a spool from the top of one anchor post to the next one
Could be very handy for live reconfiguration of spread anchor designs which need to minimize their land use impact.
Take for example this old design based on a concept originally by @kitefreak
A kite is held with pulleys, at 2 sides, across the wind.
1 pulley with a generator at 1 end.
3 pulleys with a steering bar at the other end.
The main line is a loop.
The 2 steering lines go from the kite through the bar pulleys half way along the ground.
OK fatal flaw in this drawing is it’s going to burn through pulleys very quickly but it could be adapted.
And yes tension adjusters would be better than a bar. This was just a basic as it gets demo drawing.
The point here is the control end could be picked up and moved.
Being able to live relocate anchors
This could avoids the need for any design to include a rail system to maintain wind alignment
This goes for my own designs too
Daisy Kite Turbines have movable back-line anchors.
We tested the backline on a horsetrack pully arrangement to cope with limited wind direction changes
Relocating one or even a set of back-lines anchors and backline lengths significantly changes what you can do with a kite turbine arrangement.
Similarly where a design is intended to reciprocally pump and dump lift at its feet
e.g. a swaying design like this
@Kitefreak evoked some mean (a crane) to move anchors for the scheme you quoted by the first video (Payne figure 5). There is an evolution in the lightness of the means envisaged.
I think a swivel is necessary for any device that could accomodate changibg wind directions. I think this probably means that rigs requiring many ground attachments are not real-life feasible. A robot/car could help to some extent, but that requires roads or tracks. I think then it could not compete on LCOE.
If we co offshore, the swivel could be at the sea floor, and other attachments on barges. They may even move passively. That could maybe work…
Those limitations sound unnecessary @tallakt
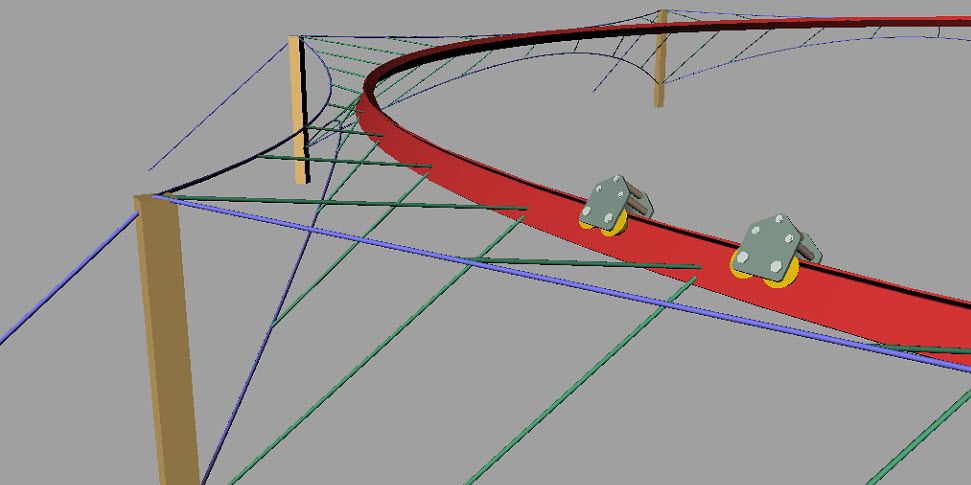
A swivel is not necessary for a multi anchored system where each anchor length can be altered to change the overall field of kites into a collected foil e.g. something like
It would be a lot of winching to coordinate but not impossible.
Also in terms of allowing anchors to move,
If the tethering line which needs moved can be unloaded, then it doesn’t need a heavy device to move it to a new anchor point. At the new anchor point it can once again be loaded in high tension.
This could be done by attaching/detaching a spool from the top of an anchor station such as the wee robot above used as a charging post.
I have a different take on handling wind changes. The wind usually becomes unstable and decreases during direction changes. Unless we have onboard power or LTA, we must land the device. It is much easier to reorient the device and relocate the anchor points while the device is on the ground. There are usually two or three preferential wind directions so anchor points can be permanently set up at these locations. A ground reorientation system is much simpler than an airborne system and this will facilitate autonomous operation.
It seems to me that for each Daisy unity the PTO (the basis including the generator) is tilted in order to be parallel to the also tilted stacked rotors. So a horizontal swiveling tray carrying everything is required and must be able to orient itself according to the direction of the wind.
It is necessary to be able to coordinate the movements of the anchors with the orientation of the correspondent turbines while pivoting the swiveling tray.
That is possible. But you still need a single point to attach the inner rig [daisy] from the outer [jellyfish]? Maybe if you want low elevation angles, the jellyfish needs to be quite large?
Another real world issue that arises is how to know the wind direction now that the jellyfish is «rigid»
Also launching these structures in high wind without tangle is not for the faint of heart
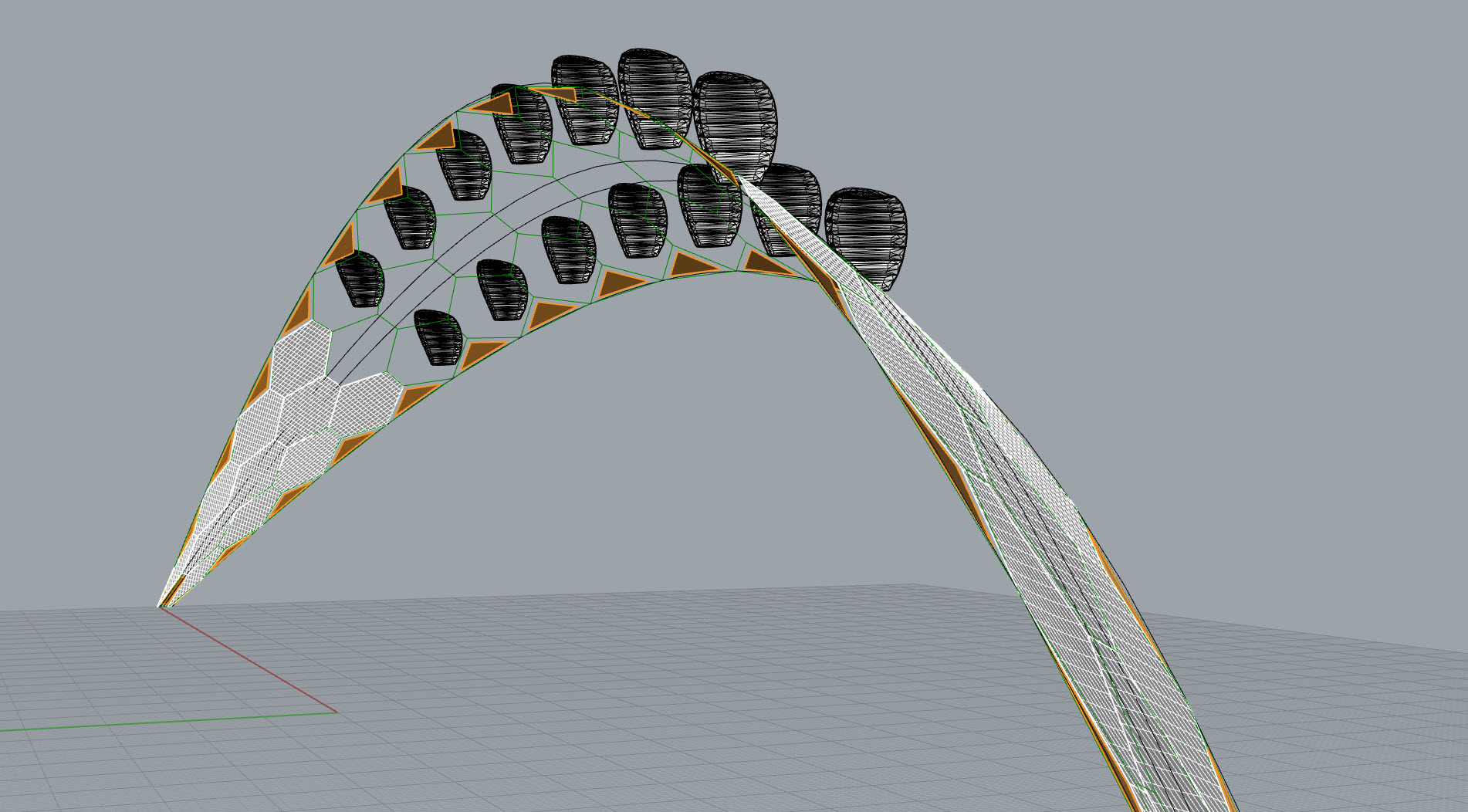
A jellyfish is surely only so rigid
The rigidity would be from biasing the lift on the nodes out from the centre.
Whereas I’d love to imagine it could be set and forget… (and I reckon there are ways to bias steering from tense net forms)
Clean control would require knowledge of each node position and some control of the tension vector.
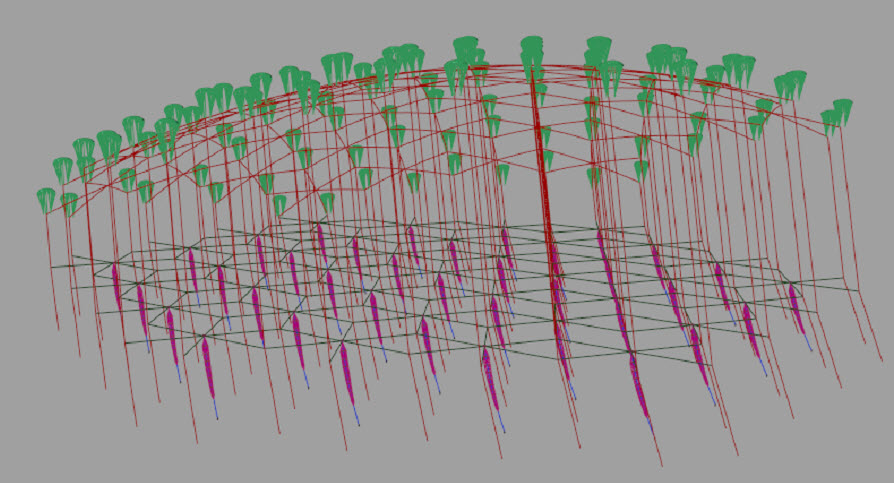
A wind change would show as a skewed topnet.
The kite closest to the new wind direction would be struggling to pull out while the other side would pull out more strongly.
A clean launch would require that topnet control and coordination of winches at every (shall we say tentacle?) tether
Yes. But how to detect that? sensors on the jellyfish require power and data transmission. Video requires complex software. Maybe you could deduce it by monitoring the jellyfish bridle/tentacle force. Maybe LIDAR, but those are super advanced/expensive right now