There seems to be a lot of terminology borrowed from the aircraft industry in AWE. Some examples are sink rate, wing loading and stall speed. Though they do provide some insight it seems to me that kites are kind of different, and I tend to return to polar curves for analysis.
I am wondering if there exists any terminology for the phenomena described below.
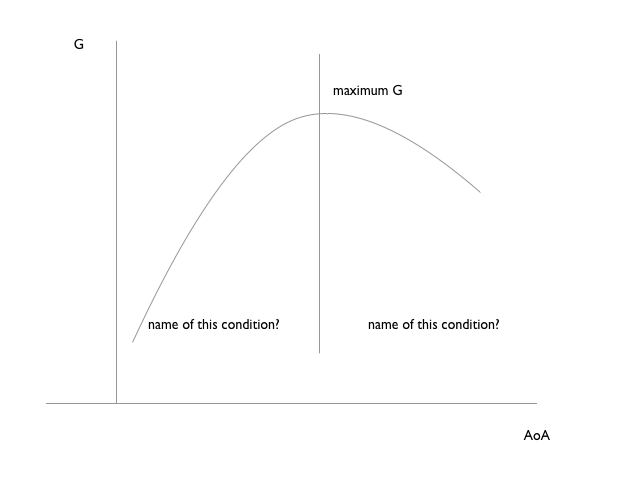
When a wing is flying at a low angle of attack [AoA], the lift-to-drag or glide number [G] will increase with increasing AoA. At a certain point, maximum G has been achieved. If we continue to increase AoA, G will decrease.
What is the name of flying on “either side” of the maximum G conditions?
It is a difficult question. In the “either side” G decreases, L coefficient increases, and D coefficient increases more.To begin, perhaps trying to know when “flying on “either side” of the maximum G conditions?”
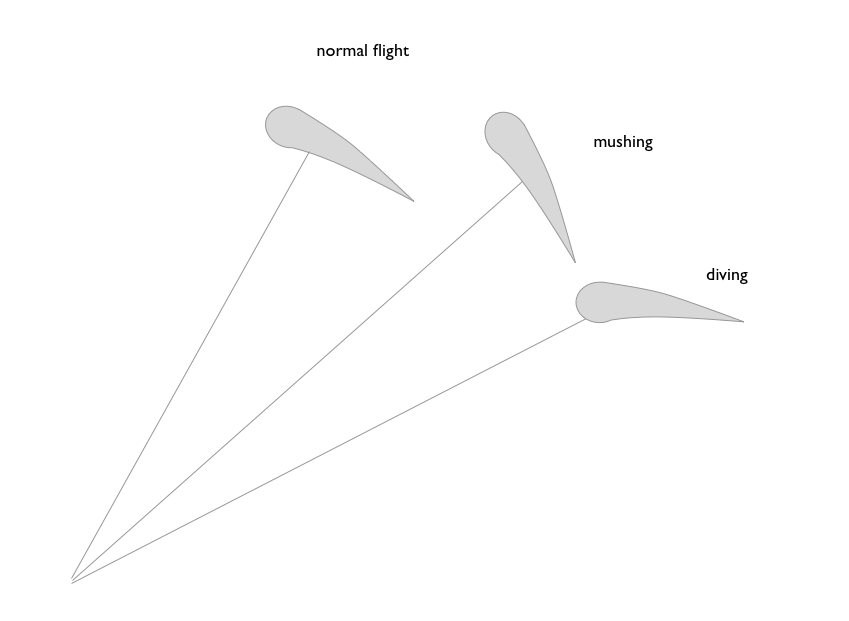
For AWE use, why not “depowered, (then) optimum L/D ratio point (or maximum G), (then) mushing.”?
“Mushing” can be also the point where there is maximum pull, and is used for several AWE configurations like yoyo for static kites, but also for crosswind kites if one considers the AoA of wing is replaced with the AoA of the full swept area that is similarly tilted.
So yoyo systems would use mushing (reel-out phase) and depowered (reel-in phase) points.
Yoyo should be using optimum G (choose alternative name) after taking tether drag into account. So for the wing alone you would be mushing, but the system should in my opinion be considered as a whole
“To achieve a (very) high CL, multi-element airfoils were considered, a solution commonly used in commercial airliners for decades through slats and flaps [18].”
Slats and flaps are used during take-off and they increases both lift and drag, the wing AoA getting closer to a mushing point IMHO. The idea is “Because the power increases cubically with CL and decreases only quadratically with CD,eq.”
Static kites like parachutes could use both higher lift and drag to increase pull during reel-out phase, using mushing point rather than optimum G that is used by a lifter kite.
Crosswind kites will use optimum G in regard to the apparent wind, but their swept area could be tilted like a static kite in mushing position.
Mushing position for static wing with high AoA or for highly tilted swept area could also be called as power position, where the elevation angle is low in order to increase the swept area and decrease the cosine loss.