That said, horizontal crosswind Magnus balloons could avoid any turn be reversing the direction of the rotation after each transversal trajectory, avoiding (in addition to possible loss of rotation speed and maximization of the space) some gyroscopic effect destroying stability. The reel-in phase occurs at an edge of the flight window, after each transversal trajectory and change of rotation direction, or after several return trips. Compared to a vertical trajectory, the horizontal trajectory doubles the amplitude of the flight on either side of the approximate center of the flight window. But the management, a little like that of OrthoKiteBunch is very complex, including takeoff and landing:
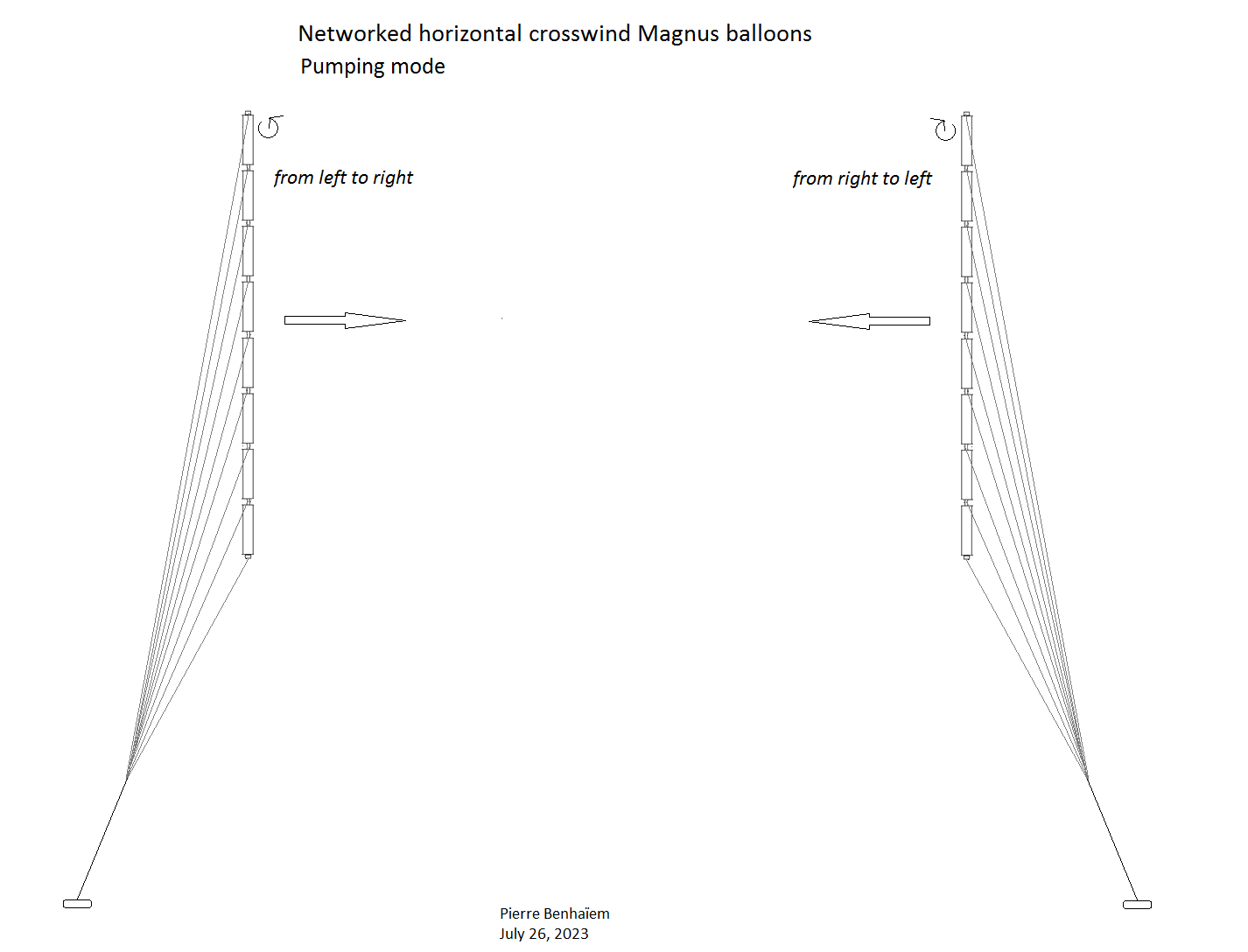
And “conventional” spin motors are used instead of motorized belts. These motors can be settled at the top and bottom of the set.