Some elements and considerations are in several topics. I gather them for a synthesis of what I think to be a suitable way for Magnus effect-based balloons. Then generally speaking, the ability to scaling considerably is a key to AWES since the length of the tethers is one of the inalienable dimensions of any AWES and determines the space used and therefore the energy density.
Preprint (DOI: 10.13140/RG.2.2.33001.67682) on https://www.researchgate.net/publication/371856926_Towards_a_gigantic_Magnus_balloon_with_motorized_belts
Description
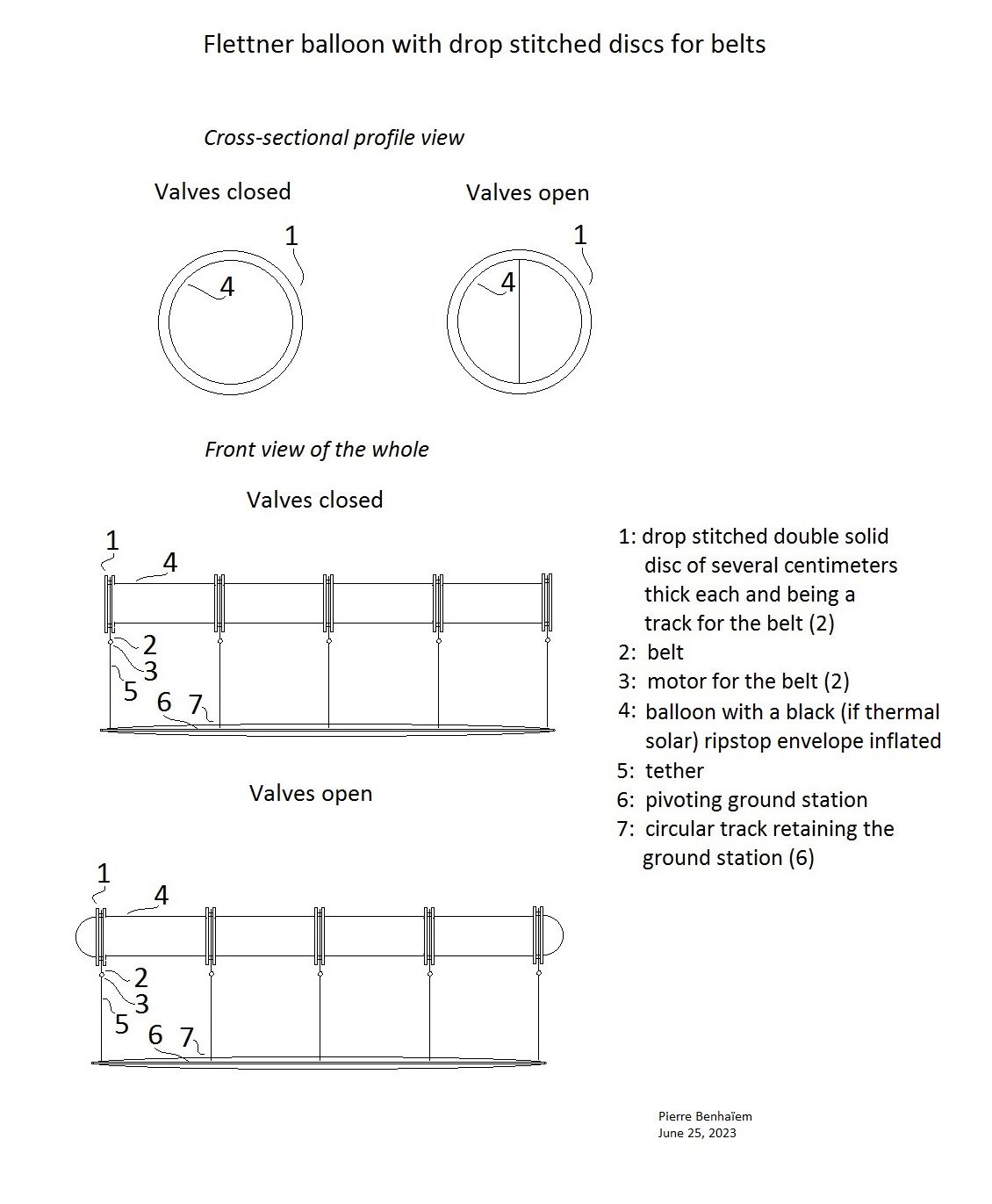
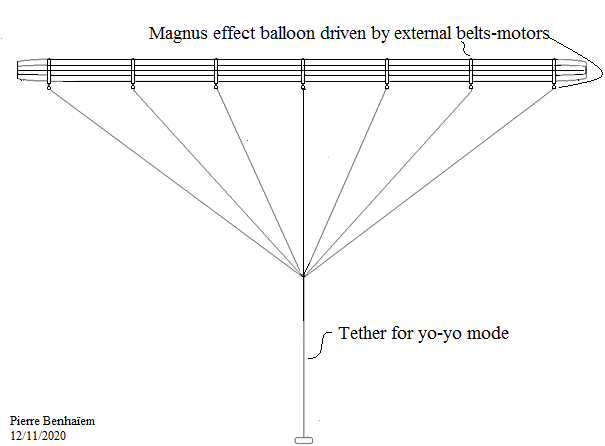
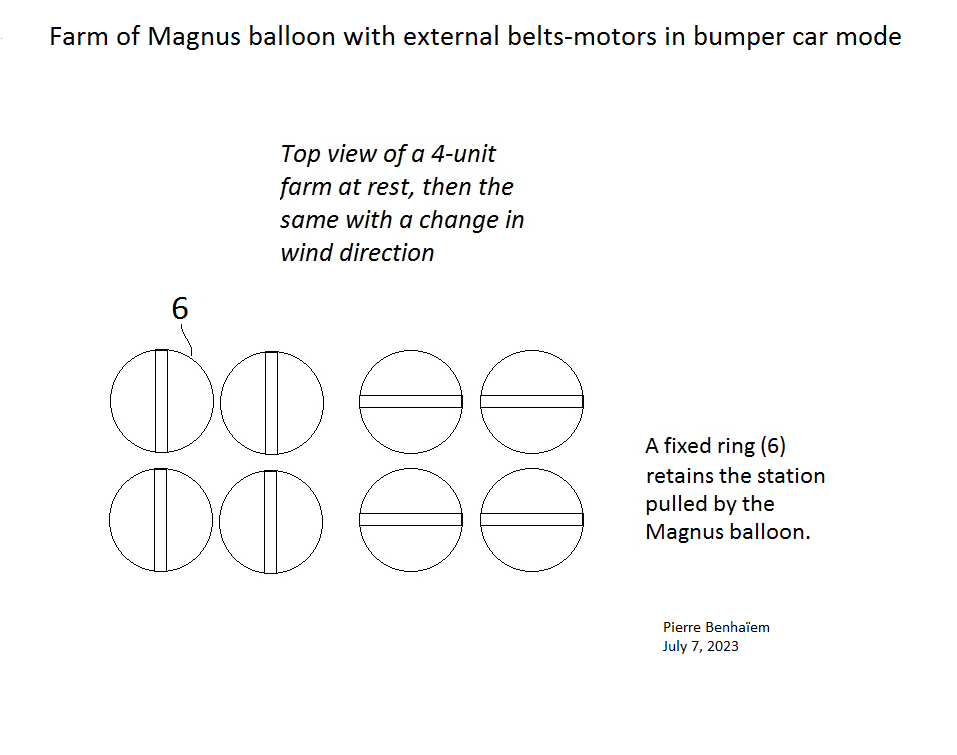
This is about the implementation of external motorized belts in order to hold the balloon on its whole length, and allowing scaling a lot. The balloon is held both by the periphery and on its entire length with as many belts and tethers as necessary. The tethers are connected to the ground station which is parallel to the balloon, and can orient according to the wind direction.
In first this paper is based on the results of Omnidea’s experiments with a flexible balloon (references in the paper), which can differ from theory or from experiments with a rigid cylinder.
Key points: the spin ratio (tangential speed/wind speed) cannot be too high because of the cubic increase in energy consumption as the tangential speed of rotation increases, and I retain the value of the tested spin ratio (to begin with and perhaps even to end with) to extrapolate with a higher wind speed of 10 m/s ; then a vertical trajectory (references in the document) leads to higher power (crosswind component) than a basic (oblique and downwind) trajectory, and allows optimum maximization of the space used due to the absence of turning; transmission by external motorized belts.
This document is a draft and may be subject to discussion.