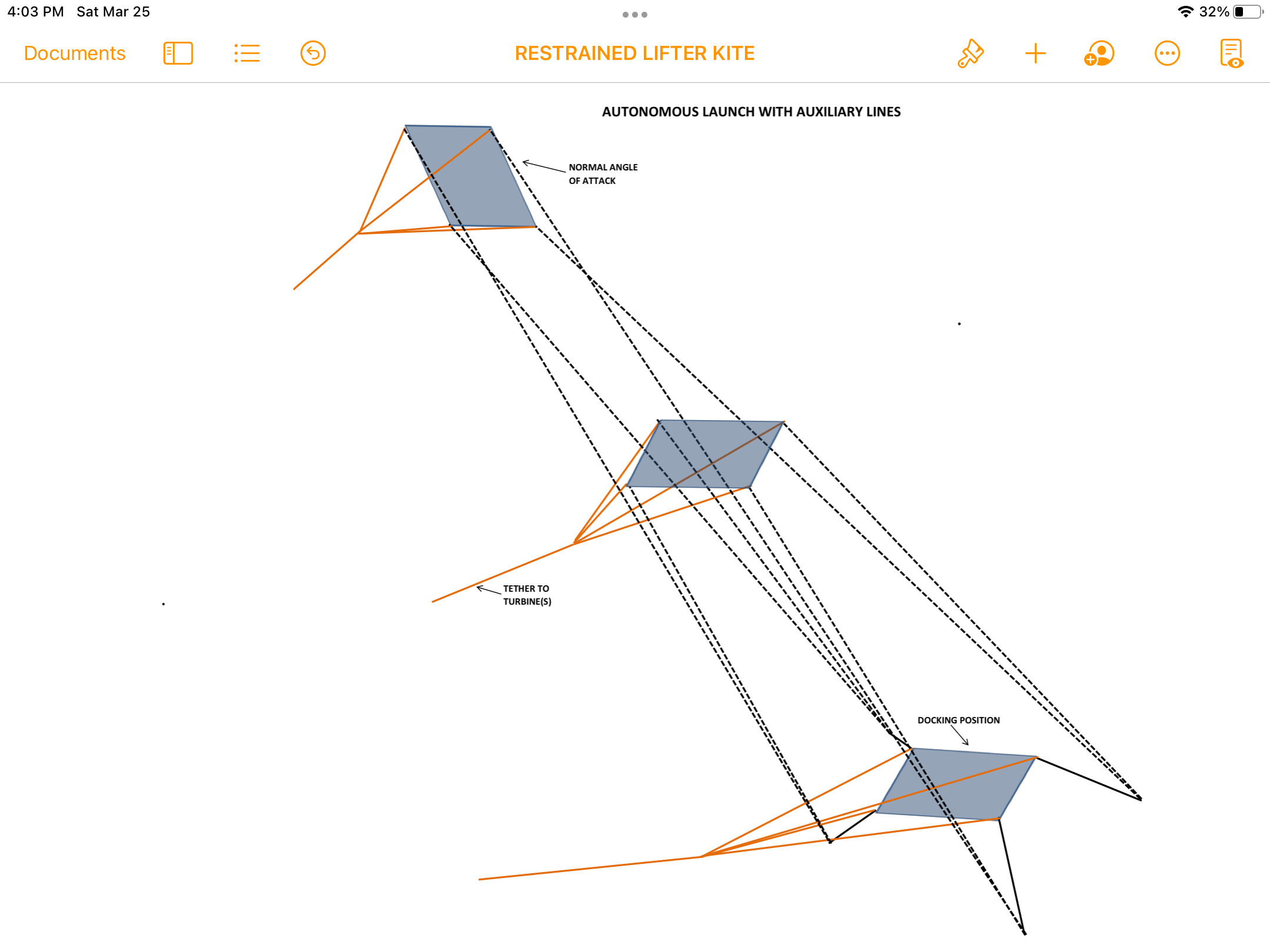
RESTRAINED LIFTER KITE
In my search for an autonomous system for launching and landing a lifter kite I came up with a concept of a restrained kite where the kite’s position was controlled at all times by auxiliary lines which are attached to the corners of the kite. These lines remain slack most of the time and are mainly used launch and land the kite under controlled conditions. I am not concerned that these lines would entangle or interfere with the tether (cable drive) since in the case of Skysails they have a line connected to the nose of the kite which remains in place while the kite is performing a “figure of eight” pattern and does not get entangled. Having four restraining lines ensures that the kite is spread out at all times especially when docking. It also ensures that the kite is launched and landed from the same place. For this reason a single skin kite can be used which is difficult to control by other means such as furling or folding. This operation is truly autonomous since the kite is launched and landed by winding and unwinding the auxiliary restraining lines in a controlled and repeated fashion. We can also control the attack angle of the kite while it is being raised by the lifting platform so that it catches the wind and separates cleanly from the platform. We can also use the auxiliary lines as a backline to control the height of the lifter kite because for most systems increase in altitude will cause an increase in cosine cubed losses. Because the lifter kite’s position is controlled at all times, the frame of the turbine system is also controlled to land at the same location. With this system the kite can be scaled up to very large sizes only limited by the strength of the kite material.