This comment asks about the possible difference in weight penalty in scaling between static (lifting) and power kites.
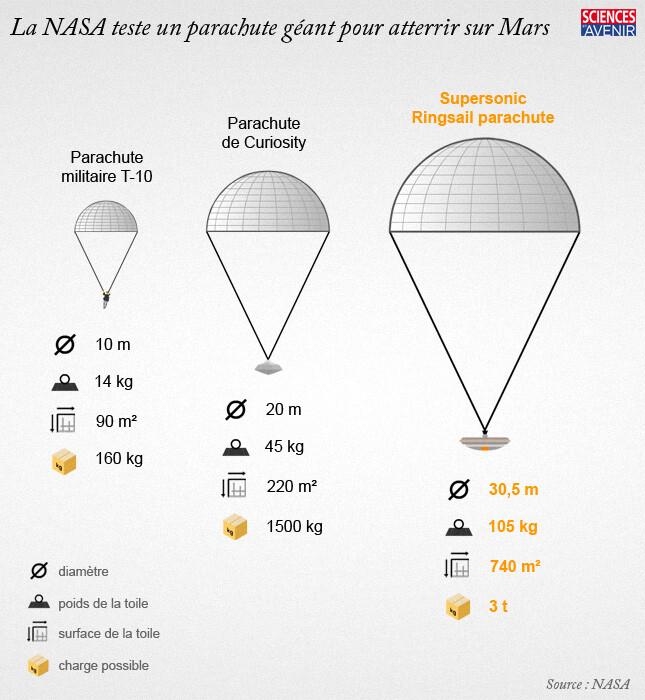
An example about how a parachute can scale (see the picture below from the linked article, easy to read even in French):
There is no (expected) mass penalty as we go from the smaller parachute to the larger one.
Considering Peter Lynn’s observation, it would appear that flexible static kites also do not suffer a mass penalty in scaling.
In contrast Storm Dunker’s paper provides values leading to a significant mass penalty in scaling, page 532:
The development originated as an Advanced Concept Technology Demonstrator
research program from Natick Soldier Systems, whereby iteratively heavier
weight requirements were levied (0.25 ton, 1 ton, 2.25 tons, 4.5 tons, 13.5 tons, and
finally 19 tons). The wing sizes were 36 m2, 102 m2, 250 m2, 350 m2, 900 m2,
and 1,040 m2, respectively.
A few lines later, on the same page:
It is noted that as the wing became larger, a heavier wing loading was used.
These Ram-air cargo wings look like ram parafoil power kites of type SkySails’ wings and for which I do not have elements about how they scale up.
Would it be possible that flexible static (lifting) kites are not subject to a mass penalty, unlike flexible power (ram or single skin) kites? If yes, wouldn’t one cause be the increased difficulty to maintain the required aerodynamic shape for a power kite as it grows, due to highly increased material constraints?