An interesting video is available.
1 Like
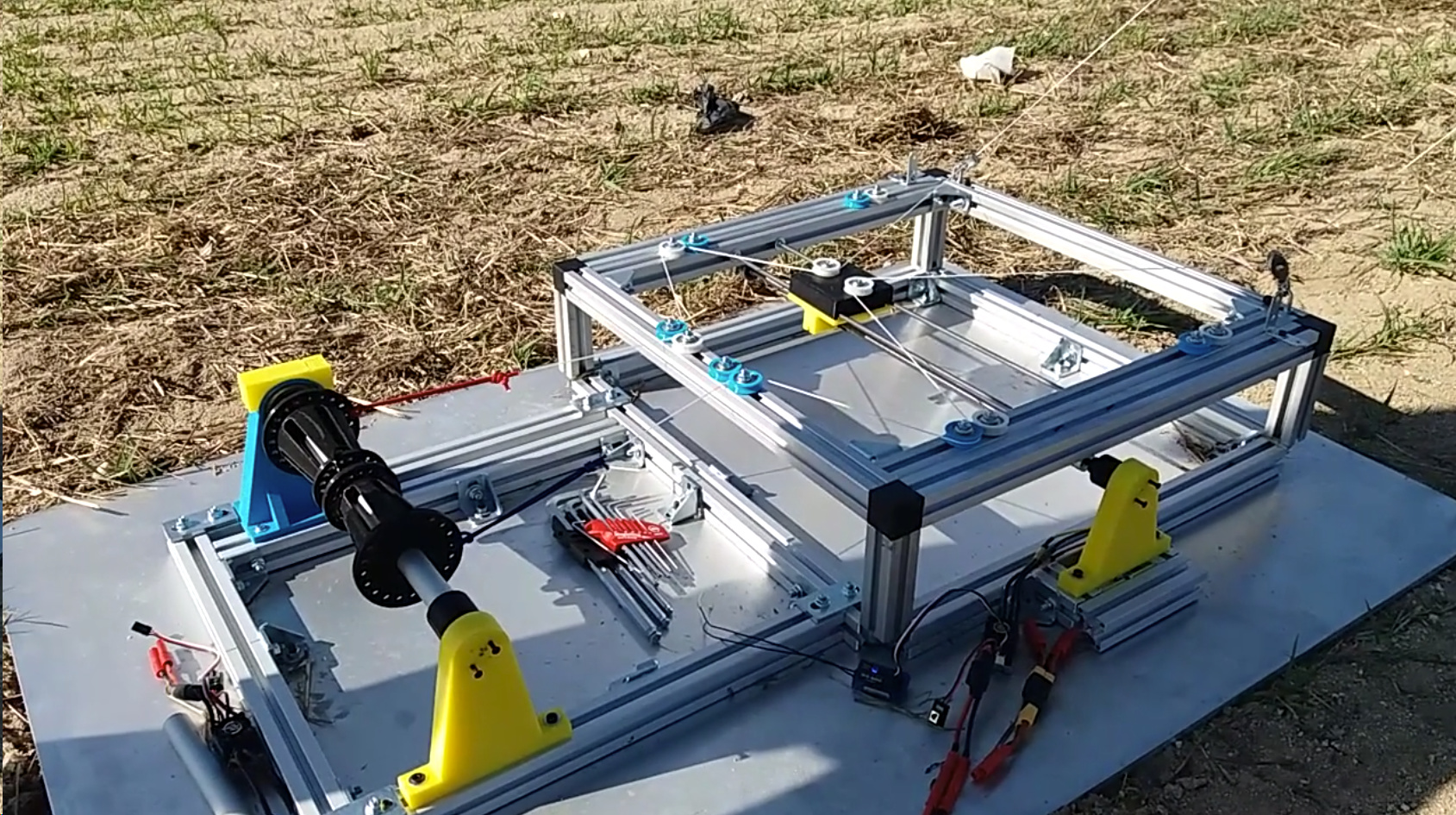
Screenshot from the video.
It’s a very nice system, dividing the two line ground station up between winch for length and automated steering. Would incur too much loss for energy production, but nice anyway.
1 Like
I can be wrong but I don’t think energy production is directly involved. It is only steering. So the two lines on the kite are the two lines in the ground station.
I know. The eventual goal is energy production so I’ll always assess wether it can be used for that.
The video on Ewindsolutions funding shows the winch acting the generator in yoyo mode while the present video shows an automated steering with the two lines. Perhaps the energy production module will come or will work if it is already there.
It can be true as the winches acting their generators are implemented and pulled by two other lines. The KiteGen KSU seems to have only two lines that steer the kite from the ground and transmit the force for the energy production.
IEEE2006111.pdf (580.6 KB)
1 Like
I was more concerned about having two lines and their drag at all in contrast to a pod.
Dividing it up between winch for energy and steering this way seems clever to me. Probably would want to do that if one keeps the two lines to have the generator running more consistently.
A 3d viewer to visualize the flight path and power production of tethered wind drones and kites for airborne wind energy applications
Has been published by Uwe Fechner @ufechner
1 Like
I believe FreeKiteSim & KiteViewer have been updated and ported to Julia from python 2.x
Available here GitHub - ufechner7/KiteViewer: 3D viewer for airborn wind energy systems
and post about it here https://groups.google.com/g/free-kitesim/c/2aX6W-GnPhc/m/C6JA4DImEwAJ?pli=1