I tried to see what means cannot go with the rope-drive. Ground steering is one of them, let alone the yoyo method.
Beside it here is a sketch of an obvious (efficient?) mean to connect an odd number of propellers. 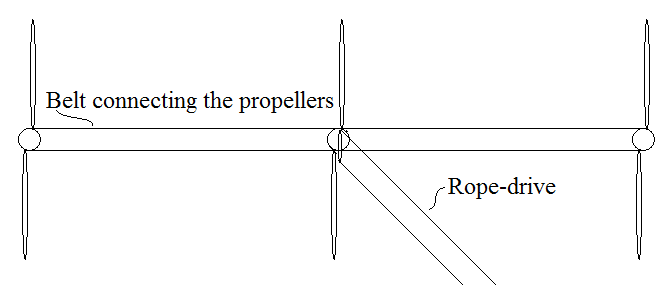
I tried to see what means cannot go with the rope-drive. Ground steering is one of them, let alone the yoyo method.
Beside it here is a sketch of an obvious (efficient?) mean to connect an odd number of propellers.