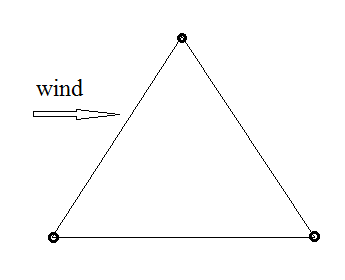
However the tri-tether configuration undergoes some losses when a not perpendicular wind to any side of the triangle occurs.
Some question to @kitefreak: is the Anchor Circle something like a rail where the anchors move according to the wind direction (What is possible with Payne's patent US3987987 figure 5?)? Thanks.