As this system should be adjustable (within a ring eg.) with respect to the wind direction, it looks to be particularly designed for a very large kite. It should be reversible if possible, that because of the forth and back move. Dave mentioned Dave Culp’s OL single skin kite.
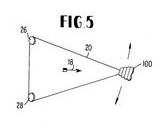
Some remark: the length of the trajectory should be the same as the distance between the two pulleys-generators, that in order to assure an alternate move without stopping generation.
Some question: how the kite can be positioned and bridled?
An expected advantage of the fig.5 and variants could be a more continuous power, but by using several ground stations. And the downwind motion of the kite occurs in a similar way as for a reeling (yoyo) kite.
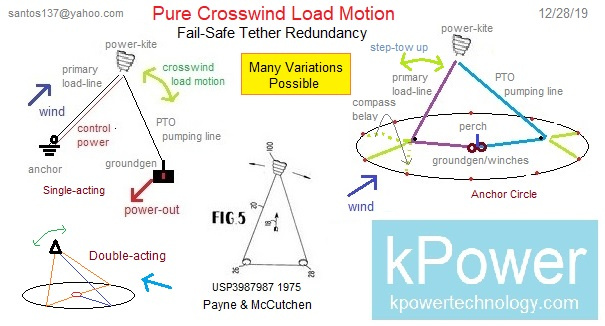
USP3987987 avoids “several ground stations” in fig5 simply by running lines via pulley to a single PTO groundgen. The ultimate extension of this method is to run a large number of lines to a single large generator by a cableway fan-in network, much like (in reverse) San Francisco’s famous cable car system uses a central motor for many cars.
Just one of the pulleys shown needs to be the PTO, not both. kPower has always just used one groundgen, but two could be used, as an open design option.
The logical proof is that Fig5 shows a connecting line at the surface. This line is only needed to combine both crosswind directions for one PTO. Otherwise two reeling groundgens could be used, with no surface line.
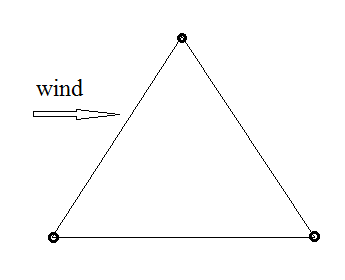
Unlike the double pulley system in the figure 5, the tri-tether mode allows it to adapt more or less to all wind directions. Moreover there is a tether more, adding some safety, and also some drag.
The efficiency per kite area of both would be that of a reeling kite without reel-in phase, so about two times more. But tests should confirm this.
The surface line can be problematic if the height is too low, or if the tether is slacking.
The control of the kite can be high thanks to the multiple distant anchors, allowing easier takeoff and landing operations, allowing also the implementation of a huger kite.
The tri-tether does incorporate the essence of fig5 with 360deg capability, but should be tested at scale against anchor-belay, such as is proven in ship-mooring, crane-work, and alpinism.
A surface line can be held higher by pendant leads at the anchors.
Superior power output and direct kite control are expected. Fig5 can also do step-tow up and sustained flight by reverse-pumping.
No other concept space meets all basic requirements so well, as a scoring matrix can confirm.
An anchor circle in its simplest form is a set of anchor points on a circle. A circle track would be nice, but its bettter not to need one, to slash capital cost.
Lines in tubes is done by San Francisco Street Cars. More capital cost for an AWES. The pendants and lifted line are cheap kite-thinking. Kiting at heart is cheap and simple.
But making a functional tri-tether plant is not simple. The surface lines prevent any secondary use or should be buried. The pulleys should be oriented during the flight. The efficiency has to be tested and proven, and can be still lower than reeling kite efficiency, at least due to the drag of the three tethers… Making power implies some downwind motion if a pull-kite is used.
The working tri-tethers I tested were very simple (compare with M600 architecture).
Three tethers for one power kite can each be thinner than one alone, and still be far safer from runaway. Tether drag is only a serious limit for high-speed wings, not big power kites.
Testing USP3987987fig5 against reeling will settle doubts. No surprise if AWEurope circle is uneager to test fig5 crosswind efficiency against their reeling and flygen rigs, as that may be the end of their ventures.
A heuristic estimation is to presume turning time is the same between crosswind and upwind/downwind phase transitions. Crosswind motion then gives full power both ways. Reeling upwind is pure parasitic loss, by comparison, and crosswind motion while reeling downwind is sapped by the downwind velocity.
USP3987987fig5 cannot face all wind directions, and tri-tether system leads to 3 rigs instead of only one, land footprint due to surface lines, and cosine losses when the wind is not perpendicular.
USP3987987fig5 is rotated to match wind direction simply by shifting anchor-points. This is obvious to anyone experienced in industrial anchoring capabilities.
Current kPower fig5 experiments are extending 2012 kFarm anchor belay within an anchor triangle to a 12-point anchor circle.
Let any AWEurope venture test USP3987987 if there is nothing preventing them.
It is for me, since I am experienced since childhood in sailing, rigging, and crane work (up to 600ton rating), where anchors are shifted all the time, fast and easy, >10 belays/hr.