DaveS sent me a variant, then some explains (I quote, re-edit) with drawings below:
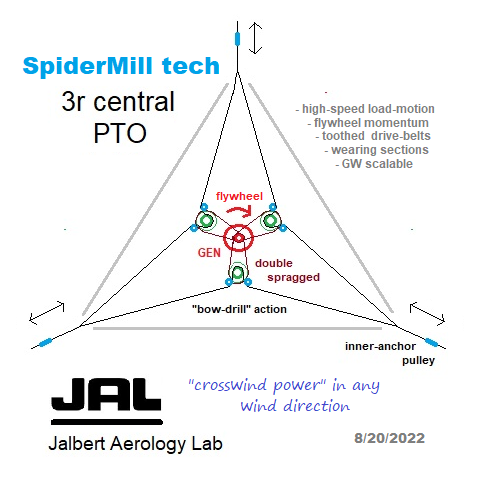
A 3-Step explanation of multi-r Network PTO. Note Max’s 2018 variant in Step 2. The earliest 3r variant is Kitelab 2008, based on turning a central crank.
Step 1:
This graphic is easily understood.
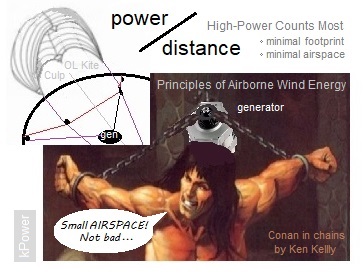
Step 2:
This pdf [Langbein 2018] variant may be where folks get lost.
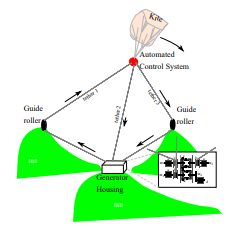
Step 3:
Is it then understood how a Network can move as one and legs serve as both PTOs and anchors?
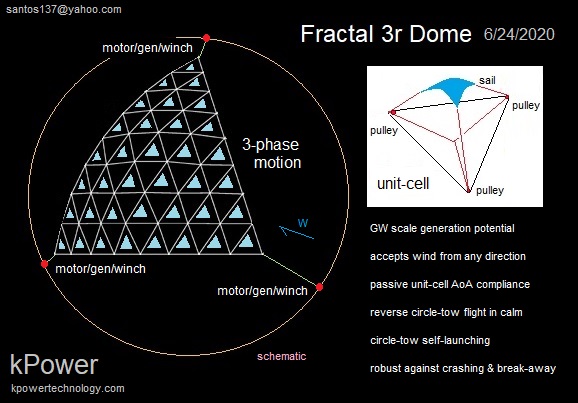
Note the 3r motor-gen anchors working equivalently to [Langbein 2021]. The kixels can passively adjust to optimal dynamic trim.