Hi Olivier, It was a question to @tallakt , by taking one of your previous observations. The question was if the friction issue leading to the high loss in efficiency could be compared to the friction issue in the family of systems (Payne’s figure 5, 3 tethers, AKN) that are described and analyzed by @tallakt on Advanced Kite Networks - #44 by tallakt and some following messages.
DaveS sent me a variant, then some explains (I quote, re-edit) with drawings below:
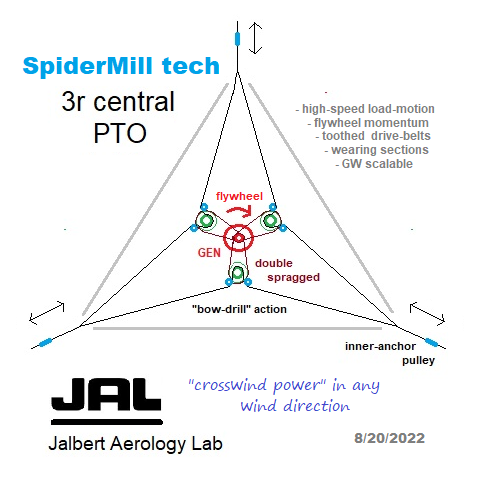
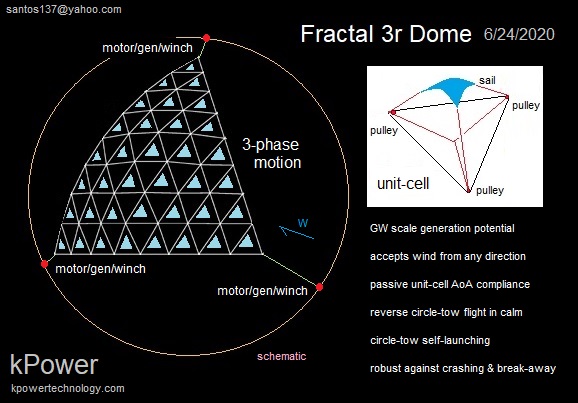
A 3-Step explanation of multi-r Network PTO. Note Max’s 2018 variant in Step 2. The earliest 3r variant is Kitelab 2008, based on turning a central crank.
For what I understand, it is when wind direction is changing. But it is true that forth and back motions require unit-cell orientation (which is described, the feasibility in a real world remaining a question) or reversible kite network. That said if that can work, that would work a little like crosswind kites going forth and back.
I must be daft because I dont understand the «this is simple» part, nor do I understand the sections prior to «this is where folks get lost».
Nor do I understand the three way pulley drawing. I do understand though that there are a few pulleys involved. It does seem to me slightly hard to analyze.
This was not a request for more info, just stating that I am giving up on this concept for now.
I think tou would be hard pressed to get any public or private funding for this, which seems to be a goal, unless the style of writing is more professional and the message is more concise. My advice would maybe be to work on that.
The only thing I think I understand is Max Langbein’s 3r drawing, which is reproduced in step 2 above and in the pdf. I also think I’ll leave it at that on AKN concept.
Don’t worry folks I’ve got a very simple brain. I think I get how it works.
The premise is - there’s a big network pattern of many big kites. The whole network of kites moves as one.
The full network motion is bounded by the tethers at 3 pulleys. (for now just assume power can be extracted by any rope movement past these pulleys)
It is supposed that the network can develop a swirling* motion around the power zone of the kite wind window. e.g. all of the individual kites act continuously together to swirl the large net.
By swirling the network, the pulleys will be driven.
The main driver of this design direction is scaling.
e.g. How to make a big wing lightweight and still able to pull hard…?
My opinion
It likely could succeed at being a large airborne network of kites
Really not keen on it though.
Problems Pulleys and high tension. **
** Limited speed. **
** Coordination in flight. **
** Coordination at launch. **
** Only 3 tethers on a giant kite. **
** Swirling
*Swirling as in this description may not be the correct term I am using it to describe
Moving round in a circle without rotation
Like a hand whisk swirling around a bowl is not spinning. Reminds me… I’ve got Sunday breakfast to prepare
I think I have also guessed the gist of the idea. But my point was I don’t understand the implementation details sketched out above.
Maybe if JAL joined forces with someone with a mechanical sensibility and proper drawing tools that could help them get through to investors (or realize more ideas work is necessary). I know JAL has their strengths more along the philosophical dimension. It can be hard for a few people to aquire the necessary quiver of skills required to pull off such a grand idea. Even Einstein was unable to wash his own laundry, that did not make him less of a scientist.
I’d place this idea under the category of “There are UNLIMITED WAYS to make SOME power from the wind, the question is whether any given way is an economical energy solution.”
Obviously, the materials are there to make a smaller-than-TeraWatt initial prototype, well, you know, just IN CASE there are any issues one might want to know about before going to TeraWatt scale. Personally I don’t think even a scale model will ever be built and run. But this sort of “talking point” design could attract a lot of funding under the “We have to make it REALLY BIG or nobody will take us seriously!” theme.
In my mind, I’m placing this in the “endless excuse” basket, where you’ll never see one run, just a series of excuses why at any given scale, one cannot quite be built and run "this week’, but instead become one more “revolutionary breakthrough concept” that was sadly never fully-explored due to the “closed-mindedness of skeptics and commercial resistance of entrenched industry insiders”. In other words, like vertical-axis turbines, it will live on as “a great breakthrough”, but its lack of adoption will be blamed on anyone who would question it. One thing that was firmly established from the beginning - it is “advanced” - wow!
I reckon you’re wrong about we’ll never see one @dougselsam
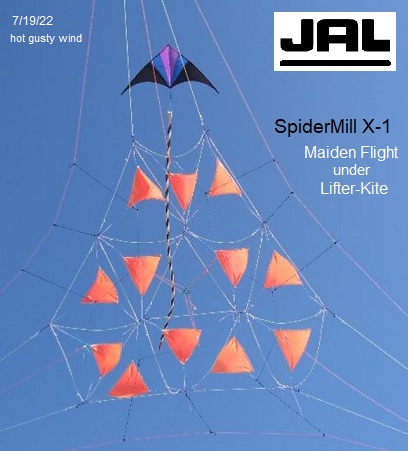
A small scale one will be shown pulling an unspecified load 2 directions in a 5.7 seconds long video
That’s my guess
If it can pull anything at all, I’d be surprised. Maybe 1 direction for 2 seconds. Why bother anyway? They had a kite pull itself up out of the sand several years ago - what else could anyone ask for?
“Providing Shade”, an important AWE function. Maybe mice could be coaxed into taking naps under these triangular tarps, and the cooling energy saved could be calculated and tabulated as “virtual power output” with “proven functionality”. Even a mouse deserves a good nap once in a while.
To return to the subject, I think the same drawings but with captions might help to know the name of the components and their respective functions. Is it possible @AweEnthusiast ?
DaveS via JohnO: “Abundant SpiderMill technical testing documentation is shared by direct email in the working circle. The New Forum is not a suitable place to report AWE technical progress in detail. JohnO cannot fully circumvent undue censorship imposed by AWEurope-approved Moderation.”