Thanks for your observations @Rodread. I am not sure to well understand what you mean. So I will describe some features as a possible reply.
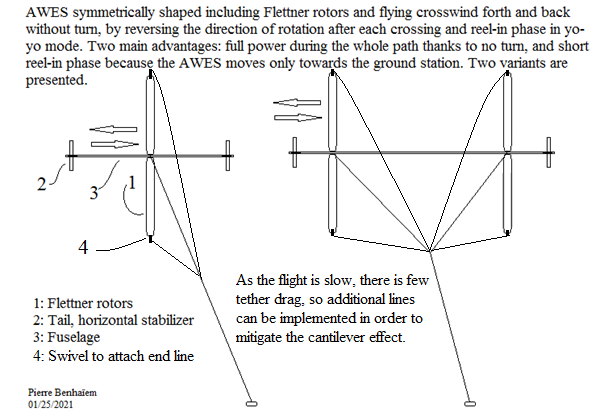
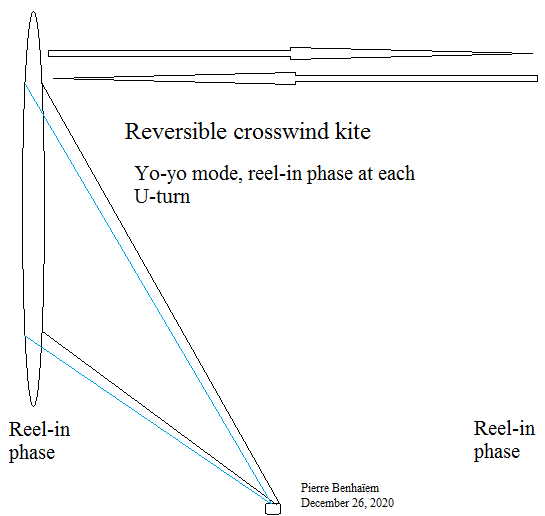
This symmetric reversible kite works like any flexible 4 line power kite, but without turning. The single anchor figures the single user. Thus a single ground station can control a 4 line kite. Here each line is connected to a respective winch which drives its own generator. The difference is that the respective generators work in one direction then the opposite direction (during reel-out phases) because the kite does not turn. The 2 x 2 winches also control the kite steering by adjusting the tether lengths during each crossing. The reel-in phases are realized when the kite slows down then stop at each edge on the flight window, before going in the opposite direction. Some maneuver could be required in order to avoid a complete loss of lift when the kite stops (thus it does not stop completely), the reel-in phases being also a part of said maneuvers, benefiting of both slow move and less powerful edges of the flight window.
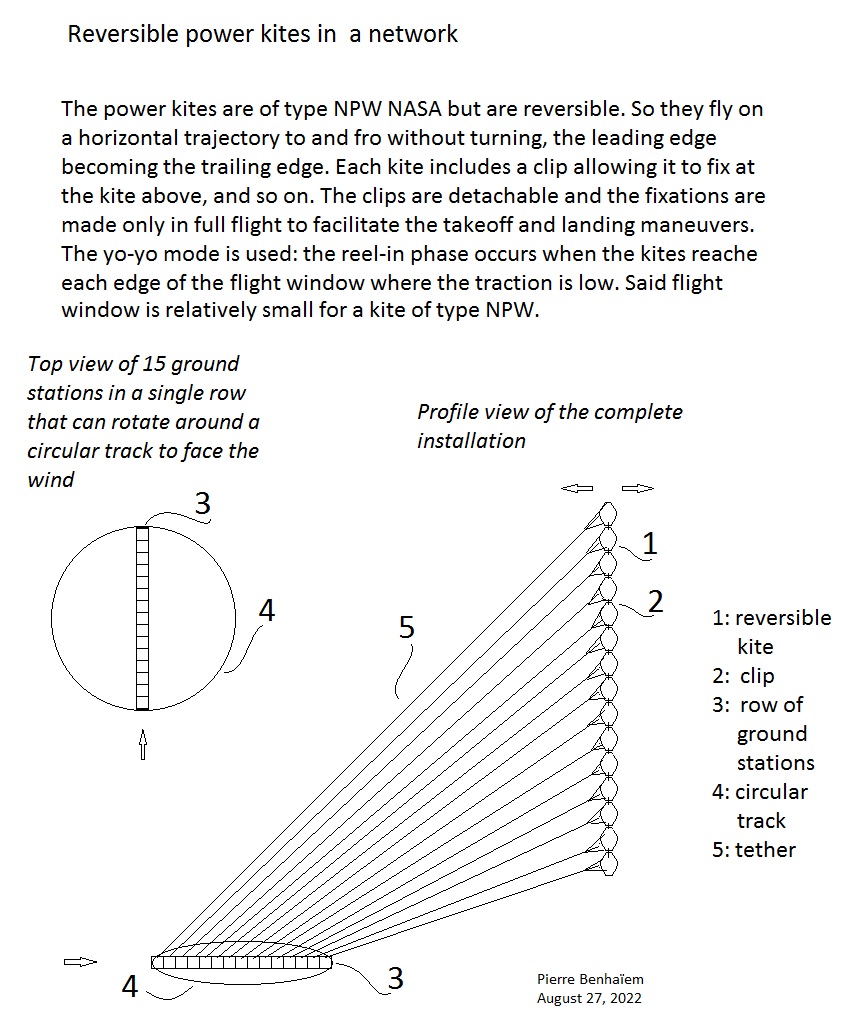
Let us note that several separated anchors impose a circular rail to face any wind direction, having to move to face the wind. A single station allows to safe a lot material and ground installations.
And the single station I prefer allows to control the 4 lines as indicated above, adding some passive safety, the kite losing power when only the 2 front or rear lines are kept, avoiding chain breaks of tethers as soon as a tether is broken. That said a reversible kite could be adapted for a several anchor rig. I think the first point is studying the kite before studying the specific ground installation.
On the old video below there is several columns of superimposed “small” kites going forth and back but turning at each U-turn. However the control of superimposed “small” kites is too difficult and mess can be unavoidable. But using only one giant kite in the place of superimposed kites is not possible because there is no place enough for the U-turn which in addition would last a long time. The lever system is replaced by a yo-yo ground station. On the video there are five stations, but a single station would be better, and also possible since the single giant kite has not only a higher span but also a higher cord, being wider to maintain proportions.
This is where the Power Harvesting Factor ζ comes: see pages 15 and 16 on:
Solidity = 1/(Power Harvesting Factor ζ x 27/16). Some examples:
ζ = 5.5 for a wind turbine, solidity = 1/9.28);
ζ = 8 for Makani, L/D ratio = 7.35 with tether, solidity = 1/13.5;
ζ = 30 for a rigid kite with L/D ratio = 14.2, solidity = 1/51.
ζ = 4 for a flexible kite with L/D ratio = 5.2, solidity = 1/6.75;
ζ = 2.37 for a flexible kite with L/D ratio = 4, solidity = 1/4;
So a flexible (possibly networked) huge kite of ζ = 2.37 and solidity = 1/4 would be a reasonable start. The flight window could be maximized for different sorts of single kites.
")