The “backfly” is a maneuver to fly a flexible kite backwards by acting on the trailing edge. On a 4 lines kite we act on the two back lines as “full brakes” to obtain a “backfly”. Quick chained steps are made: releasing, pulling, releasing, pulling, in order to control the fast descent.
The topic Vertical trajectory for yo-yo AWES? mentions this not orthodox way of flight without using the “backfly” term.
Now there is some videos about flyback below:
The video below perfectly shows a backfly, at 8:10, the pilot saying “full brakes”, then a complete cycle upward flight and flyback between 8:30 and 8:42 (note that the speed of the kite is roughly the same during upward flight and flyback while the kite is fully depowered during flyback):
I verified the full depower during the flyback (low quality video as I both piloted and filmed):
The control of a flyback should be possible by automated management, using suitable algorithms and tests.
For AWE it could be a way to realize a full yo-yo mode, the kite flying upward during reel-out power phase, then flying backfly during reel-in depower phase. This sort of trajectory can allow the kite to stay in its lane. So A kite-farm maximizing the space and land use, mitigating entanglement risk, is more possible.
In the sketch below a fictional huge kite (span = tether length) is replacing with several kites side by side.
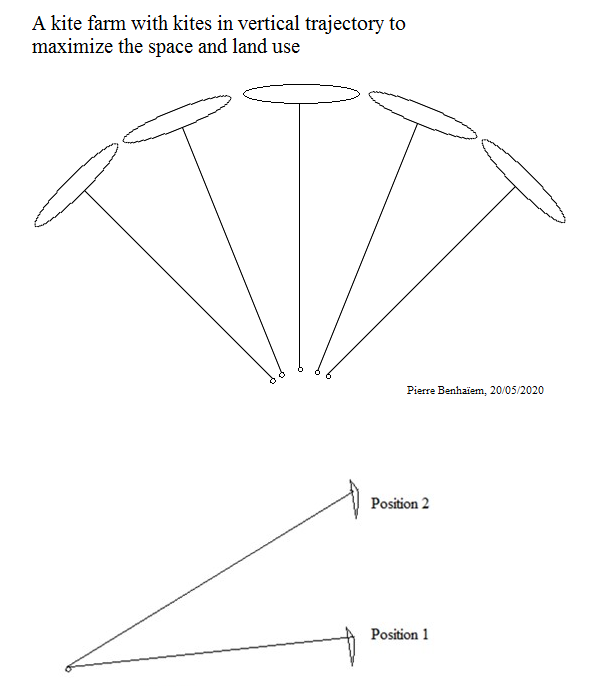
To borrow an image, let’s say that the space occupied by an AWES farm is like a racetrack or an athletics track, with lanes for each of the participants. If all participants use their respective lanes by using something similar to vertical path, the race can take place. If only one participant uses something like eight-figure with large radius turns he will have to encroach on the neighboring lanes, and the race cannot take place.