Pierre, all this calculus seems to be right.
We do not measure flight angle right now, just a guess from what I see.
I think you forgot one important thing: the system you design shall work on the larger wind frame possible. 10m/s is a really favorable condition. Kiwee start at 5 m/s. At this windspeed, flight angle is much lower and weight of the flying parts has a huge impact.
I didn’t forget this. It was the reason why I already mentioned this on my previous long post:
Assuming 5 m/s wind speed, this model of calculation would begin with the corresponding angle of elevation and would work in the same way. But it would be different for the weight as I mentioned.
1 Like
To complete my previous message:
“Much lower”: even using a 4 m² instead of a 2 m² lifter as you mentioned? This confirms the higher relative value of the weight at lower wind speed and was one of the three reasons I used 10 m/s wind speed, the second being you provided some data with this value, the third being 10 m/s wind speed is often mentioned as a reference value.
1 Like
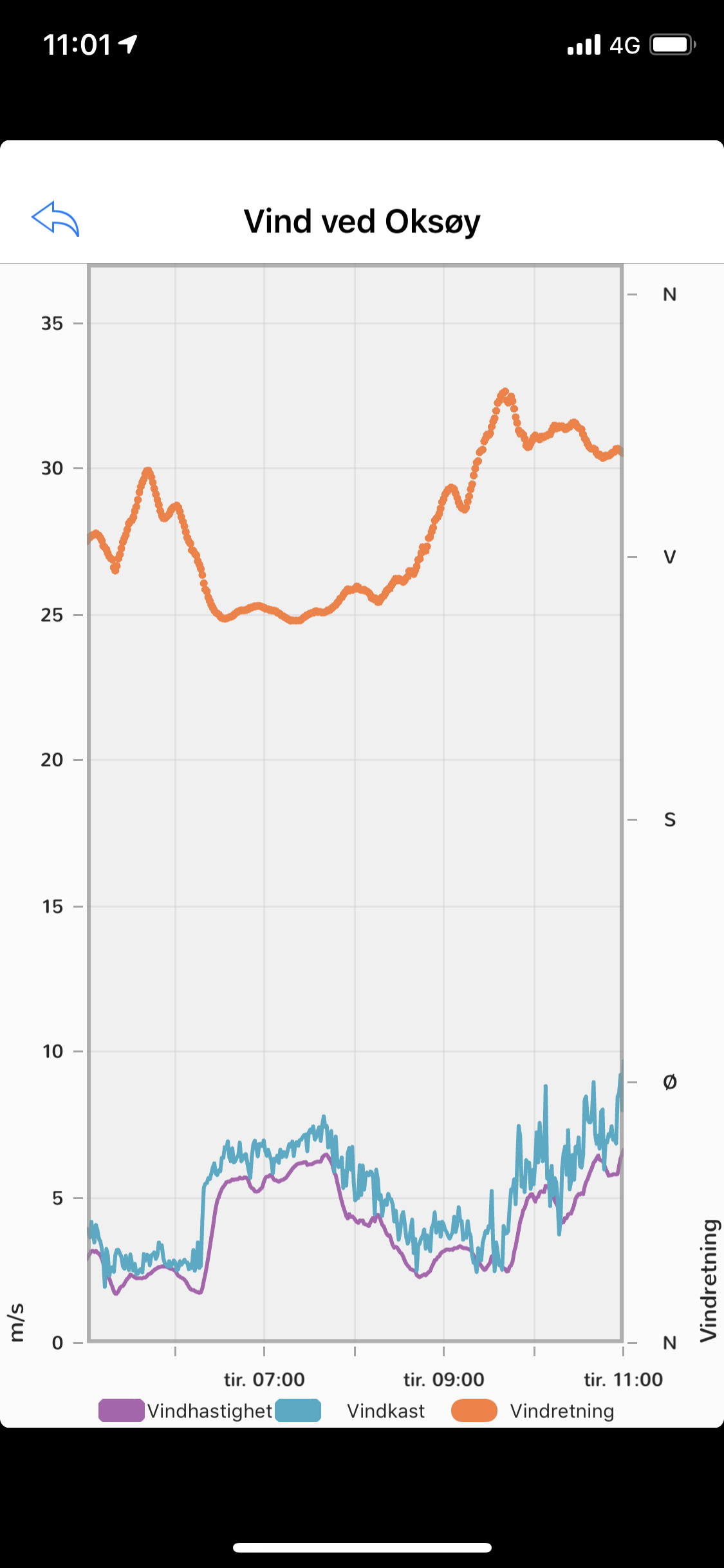
Hi. Today we had good conditions, 5 m/s wind average gusting a lot and sunny.
I brought out my Peter Lynn SSSL 3 m2 pilot with a 10 m hollow tail. I was ready to test:
- wind speed at kite with anemometer
- movement of kite with gyro/accel
- tether force over time
- remote controlled release
As you can see I have been quite busy in my workshop.
I started out testing the kite with only the remote release. I will release details of this design once I have tested it a bit more. Anyways, at the time I was flying, the wind had picked up gusting over 9 m/s.
The kite flew for 5 minutes with quite a large pull (estimated 20-40 kg force). At one point it started pulling to the right and I was able to save it by pulling the tether, but the second time it was impossible to save the kite.
I can conclude that the SSSL flies as well underwater as in air, it was quite a job to pull it out of the river currents. I did not measure underwater L/D, sorry.
I could also conclude that the radio receiver I used actually does work after submersion in salt water, as does my tiny LiPo battery.
Anyways, I can only conclude that a mass hanging of the trailing edge seems more efficient in terms of pointing the kite to zenith rather than a tail. The tail will stabilize the left right movements but not help much in terms of pointing to zenith at higher winds. (I would like to test this in the future in a more scientific manner)


See how well the kite flies underwater!
3 Likes
Great to see someone actually building something!
What would you like to lift with that kite?
We’ve got a new category Homebrew suggested by @Rodread. Every system by a forum member gets a thread and they can share their progress there.
I was planning to lift other kites that I am testing. So sort of a huge Yak shave there. The Homwbres thread came just a little late for my post…
6 posts were split to a new topic: Building a RC pilot kite
I think my analysis was wrong as were the results. An explain is below:
It is an affair of tangent, not cosine.
So the L/D ratio is 2.4 which is Tan(elevation angle of 67°).
Here the difference is tiny, but some other differences are larger as shown below.
As lift to drag ratio is 2.4, drag = 100 N.
240/166 = about 1.445, so Tan(55°30’). The elevation angle is 55 degrees 30 minutes, so far higher. Now, by taking account of the lightly corrected L/D ratio of 4, we have 240/170 = about 1.41, so Tan(54°40’). The elevation angle is now 54 degrees 40 minutes.
384/223.6 = about 1.717, so about Tan(59°40’).
1.22 = Tan(50°40’). Here the difference is very large.
For that L/D ratio should be 0.7, so Tan(35°), not 1.22.
If we keep the initial (lightly corrected) numbers for the kite (240 N lift, 100 N drag, 4 m², lift coefficient of 1, so a drag coefficient of 0.416), and the initial numbers for the turbine drag (70 N, 1 m², drag coefficient of 1), we obtain a L/D ratio of 0.7 by the following way:
0.7 = about 240/340; we withdraw 100 N of kite drag; 240 N of drag turbine remain, so the drag of more than 3 turbines (3.428).
Of course with lift coefficient of 1.6, and yet more with that of 2.9, and drag coefficient x 1.6 then x 2.9 respectively, still more turbines could be lifted with the kite of same area (4 m²), at an elevation angle of 35 degrees:
with lift coefficient of 1.6: 384/548, so more than 5 turbines (5.54);
with lift coefficient of 2.9: 696/994, so 10 turbines.
These results are far from the previous.
Subtract the weight of the flying parts from the lift in all cases. Indeed when the wind speed is low this weight takes a larger impact. Example with the weight of flying parts being 25 N: the 4 m² kite is assumed to have a lift of 240 N at 10 m/s wind speed. At 5 m/s wind speed it will have a lift of only 60 N (240/4), then 35 N by taking account of the weight of the flying parts (25 N), the drag being that of the kite, so 25 N (100/4), + the drag of the turbine, so 70/4 = 17.5 N. Lift to drag ratio = 35/42.5 = 0.823, so Tan(39°40’).