There are several means to achieve stability: tails, cones, beams (Morse sled) and so on, without forgetting the wind energy system itself.
@Kitewinder, @Rodread, @dougselsam and others use a lifter. Several concerns can be examined as stability but also [power/lifter area/elevation angle] ratio, lifetime etc…
To begin the following video:
2 Likes
I was very lucky to have visited Peter Lynn while on holiday a few years ago. Wow. He let me sew a new pattern 1skin boomer on his home sewing machine. Mecca. I’ve used that kite as my main go to lifter ever since. OK it’s not perfect. The design has just sooo much lift to weight, unreal pull. But it has an overpowered imbalance which can eventually send it hunting way down to the sides.
It can be tamed with tails in various configurations but they’re never 100% balanced. It can be really easily steered with the b2 lines so as a 3 line kite it’s rock solid.
Another trick which needs to be explored more is flying from a networked bearing mount.
Tests of this have involved setting basically 2 hubs on an axle the top hub as a frame to fly from… The bottom hub is used to guide the axle… This way the flight inclination (set by the top hub tilting ) is guided by the bottom hub & setting the axle angle (which can also be tethered to use as a lift line)
Each of the bridles on the standard model is the same length 3.1m ( for ease of manufacture mostly I think) but if the steering bridles are connected a bit further out from the axis… Axle tilt leads to the kite aligning to the hub (likewise brake & nose make fore and back)
Because wide lines can now be used for steering and stability… I reckon That could make for an amazingly simple & massive tight net, mesh-like surface for mounting hundreds of lift kites as one meta kite.
Or at very least a very simple platform for a controller.
Can’t see my tilting hub steer test on YouTube
In the meantime…
Still can’t find any video of me testing a hub steer… Know I filmed it once.
3 Likes
Hi, I dont have a lot of single line kite experience. I have flown a few pilot/flowform type kites, and now the 3 and 6 sqm SSSL kites from Weifang. I also flew the nighthawk in strong winds.
I experienced the issue that the SSSL kites want to pull left or right into a deathdive in higher winds. The pull is very good though, and they fly quite high, I measured 45-60 degrees. It was moving a bit though.
I really like these kites to fly as high as possible. The kite I have that flies quite low tends to not be able to lift very much as the force is so much in the horizontal direction and not straight up.
The problem with adding a tail is added drag. The kite flies better, but at a lower angle. Also I believe the tail wil only stabilize the yaw axis of the kite, and not help much with death dives. (I have not tested enough here though)
Some problems that is inherent with a high flying kite is that, as it uses rear mass to point to zenith, the geometry is such when flying high that the rear mass will have less effect to steer the kite. To explain what I mean, consider a kite flying directly overhead and one flying directly downwind. If both kites are made to point at an angle left or right (yaw angle), the kite overhead will not have a gravity straightening torque applied, while the downwind kite will.
I tried adding mass instead of a tail, I feel the kite is more stable bu doing this. Its still not a perfect solution though. More testing to follow, as I really like these kites, and have a few more «good» ideas to make them more stable without sacrificing lift-to-drag ratio much.
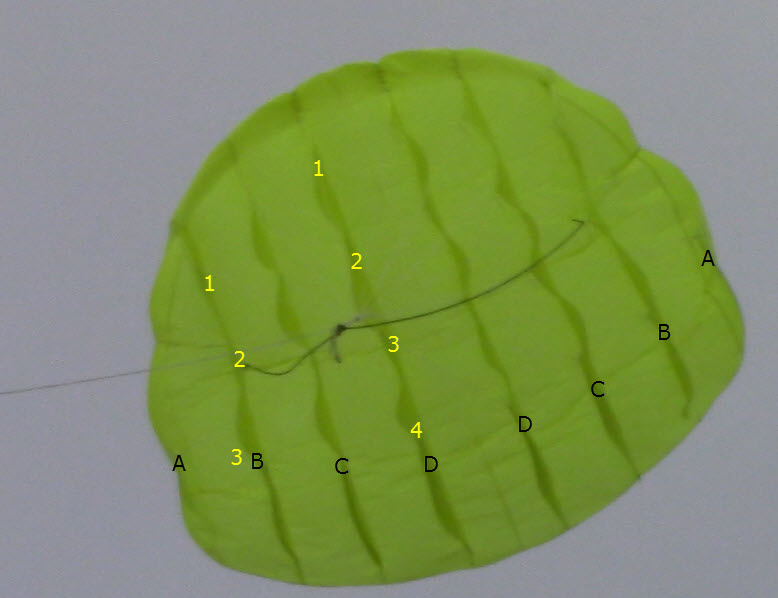
@Rodread I would be happy If you could draw/explain the proper naming if the SSSL bridles. I have my own numbering system only to lack of information. I dont know which bridle is B2.
As to the flowform kites they fly much more smoothly, I only had some issues launching them from short (30 m) line, where they would deathdive easily. Longer lines and the issue disappeared. They are dependent on a tail though. The ones i tried are called KAP foil 1.6 sqm and 3.0 sqm.
I havent actually lifted much with them yet. I not really a big single line kite guy, but as of recently I found some use for them
2 Likes
Hy guys, My early first love with kite was and will remain the Cody. I flew a HQ Cody at 1000 meters high ones,
flew it with this home made winch we still use during festival or events.
We also test flowform kite, parafoil kite. Both quite good.
Never used single skin kite as videos show a unstable behavior.
Best to date for me is the pilot. Comes in various dimensions at a great price. Keychuan kite are great but still a little pricy. Have a try at fullfar pilot kite, two time cheaper than keychuan’s ones.
5 Likes
Even when a kite has stable behaviour I can make if go freaky.
Here is one of my early attempts adding control to a lift kite… Uhhh it went that way?
Yep, this sled turns to the left when the right hand bridle has more tension.
I tried a really dodgy arch stabilised sled … don’t
Whereas with an sssl more tension added to the right hand side takes the kite right.
The best line to get a steering response from an SSSL is the B2 line as shown here
This screen grab is from a test putting elasticated B2 bridle links lower down the lift line … what was I thinking?
Now I use a tail which is held by a cradle from the 2 x D webs at the trailing edge and a midway-ish point on the 2 B2 bridle lines.
The KAP foil I show being tested in the first video Can you share your experience with your lifters?
Is more stable… but has much les lift and line tension
2 Likes
Now I feel like going out to fly a kite! Thanks @Rodread
I’ll share any results, but your miles ahead of me
Note: I updated my drawings in A depowerable bridle for Peter Lynns Single Skin Pilot SSSL - but your SSSL is slightly different from mine it seems
1 Like
Been wanting to build a wee ardupilot and servo lift kite controller with onboard power for ages now.
This could be a standard gizmo ready to clip onto anyones lifter kite…
There must be a market waiting for that already…
Applications like … lift your phone to get signal, hoist a protest banner high, fly a kite with a camera…
I’ve done these without control … but it’d be nice to know a gizmo could look after my kite for me
I have some bear parachute kites like this http://www.brookite.com/air-bear-kite-and-parachute.html.
The bear is used as a stabilizing ballast: this kite flies better with its bear. I replaced it with a tail and it is also correct.
You could use the bear as an ardupilot then implement servo lift kite controller (?).
I’d like to do that as well. Already have a very light mechanical design in mind. Would you like to collaborate? Do you like Fusion 360?
I want to use it to control the aoa of a lifter, so maybe you need a faster movement than I had in mind.
I am thinking about the same.
@Rodread Looking at one of your latest videos, I am thinking when you have so much drag on the kite that if falls pretty far back into the window. It could be stalled, and fly better with a lower AoA on the bridling.
Btw I really enjoy your videos
1 Like
Just an update. IMHO high flying kites are generally more useful than downwind kites. So I am interested in L/D and such. I measured this the other day.
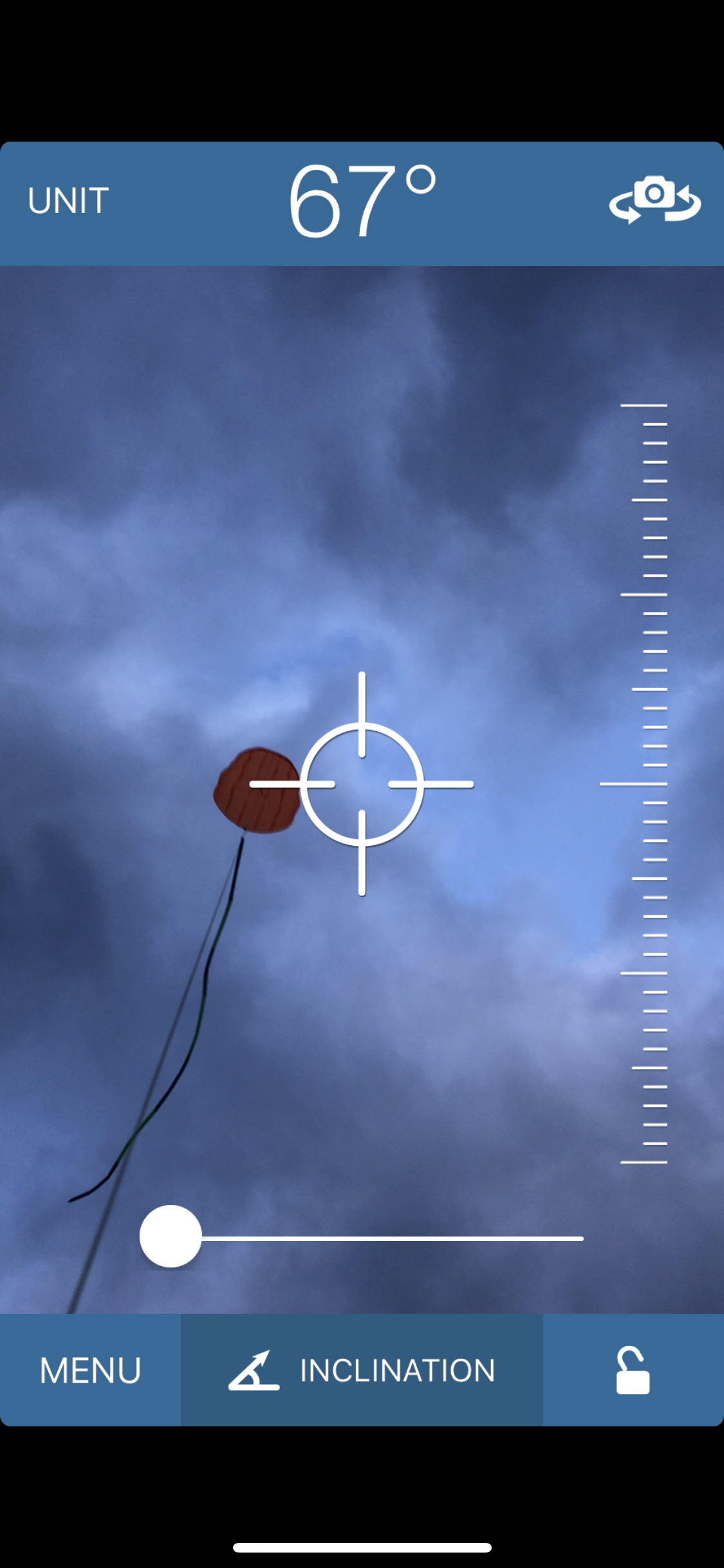
I added a hollow tail to calm down left-right motion.
67 degrees should mean a L/D ratio of 2.4. I believe this is quite good for a Pilot type kite, in particular one that flies in very little wind and pulls like nothing else.
High wind needs to be solved for this kite though
4 Likes
That is really interesting talllak. Such measurement interest me and all the kitewinder team. If you could measure flight angle, pull and wind speed (at height) that would be wonderful.
With a variety of kite… Even better
2 Likes
I have some observation-question to Rod and to Olivier about the size of the lifter in regard to the rotor swept area, and also about the elevation angle. Please correct me as I am not sure for the numbers.
Daisy: the tilted rotor swept area is about 6 to 18 m² (after cosine loss) with respectively one and three layers; the lifter is only 2 m², and the elevation angle is about 30-35°.
Kiwee-one: the non (or little) tilted rotor swept area is a bit more than 1 m², the lifter area is 2 to 6 m², the elevation angle is about 55° (a high) value).
So a tilted rotor would allow save some lifter area, even by considering the difference of both elevation angles (which would require more accurate calculation), no?
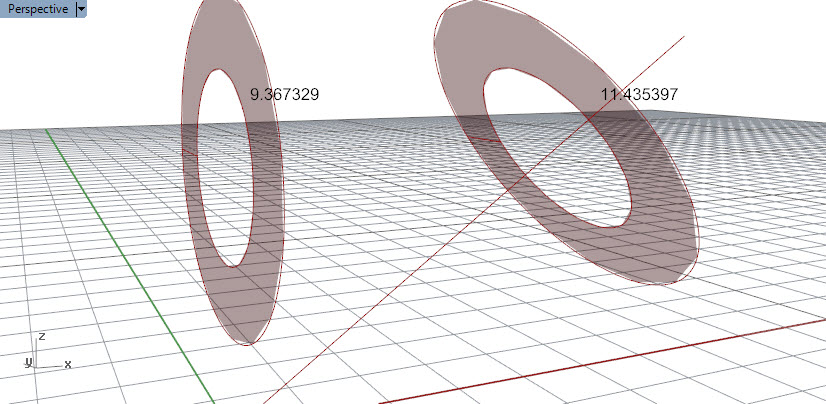
2.32m outside radius
1.32m inner radius
| sections | length | circumference | pi | dia | radius | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 6 | 1.7 | 10.2 | 3.141592654 | 3.246760839 | 1.62338042 | ||||||
| ring radius | outer tip radius | inner tip radius | total disk swept area | inner hole area | wing swept area | flying angle 1 | flying angle 2 | flying angle 3 | projected swept area 1 | projected swept area 2 | projected swept area 3 |
| 1.62338042 | 2.32338042 | 1.32338042 | 16.95812039 | 5.501821211 | 11.45629918 | 30 | 35 | 40 | 9.92144612 | 9.38445089 | 8.776034322 |
| Radians | 0.523598776 | 0.610865238 | 0.698131701 |
2 Likes
For kiwee one flight angle is depending on wind speed. Flight angle at 10m/s windspeed is greater Than 60deg. At that speed, our theoretical extracted power is around 240 watts (by memory). Our measured extracted power is around 210 watts. Wind turbine Drag is about 70 newton.
Thing is, the farthest you are from Betz, the less power you produce and also the less drag. Right now we are really cloth from Betz. Maybe rod is not that cloth. Thus he has less drag… Rod ?
Another difference, kiwee propeller is cloth to the kite, daisy is far from the kite, cloth to the anchor.
2 Likes
That suggests the swept area is a bit more than 1 m². Please have you the lifter area for these measures, as 60 degrees is a very high value? The 210 W value shows also a high efficiency of the belt transmission.
It would be interesting to know the required lifter area, using an elevation angle of about 35 degrees like Daisy, then comparing the respective materials that are used.
Yes à little more than 1 m2.
Regarding lifter surface area, as soon as you have consistent wind, kiwee can operate with a 2m2 pilot kite. If the wind is weaker, we need a 4 m2. That is why we choose 4 m2 pilot.
60 degree is not a really high value in consistent winds, more of a common one.
210W is the propeller value. You have to had right angle efficiency and belt transmission efficiency in the calculus if you want to look at power production. For flight angle concern, only propeller characteristics matters
1 Like
Please have you the drag and lift values at 10 m/s wind speed (or both and the elevation angle) for the 4 m² pilot alone (without the wind turbine)?
I don’t, talllak has began some measurements, maybe he has that
Assuming wind speed is 10 m/s, the turbine drag is 70 N, the elevation angle is 60 degrees, the kite area is 4 m², the wind turbine would be 1.2 m² and its drag would be equivalent to a 1 m² area perpendicular to the wind and with a drag coefficient of 1.
60 degrees should mean an L/D ratio of 2, that with the wind turbine.
Now what is the L/D ratio of the kite alone? Let us take the elevation angle value of 67 degrees from @Tallakt’s assessment, so a L/D ratio of 2.5 (the cosine is 0.3907), then see how it can work.
Let us try with a reasonable lift coefficient of 1, so a drag coefficient of 0.4:
Lift = 1/2 X 4 [kite area] x 1.2 [air density] X 1 [lift coefficient] X 100 [squared wind speed] = 240 N.
Drag = 96 N.
The L/D ratio with the turbine (adding 70 N) is 240/166. That doesn’t work as this value is far below 2. Or that suggests a cosine of 1: (240/166) = 0.69, so an elevation angle of 46 degrees, or a higher angle value than 67 degrees for the kite alone or another variable to be changed.
Now let us try with a yet reasonable lift coefficient of 1.6, so a drag coefficient of 0.64:
Lift = 1/2 X 4 [kite area] x 1.2 [air density] X 1.6 [lift coefficient] X 100 [squared wind speed] = 384 N.
Drag = 153.6 N.
The L/D ratio with the turbine (adding 70 N) is 384/223.6. That suggests a cosine of 1: (384/223.6) = 0.58, so an elevation angle of 54 degrees. It is better but not still 60 degrees.
In fact that works from a very high (although not impossible) lift coefficient of 2.9, implying a high drag coefficient of 1.16:
Lift = 1/2 X 4 [kite area] x 1.2 [air density] X 2.9 [lift coefficient] X 100 [squared wind speed] = 696 N.
Drag = 278.4 N.
The L/D ratio with the turbine (adding 70 N) is 696/348 = 2. It looks correct now.
One question was also a comparison with a tilted rotor like Daisy.
For it let us evaluate Kiwee-one with the same angle as Daisy, so about 35 degrees, that on the basis of the last numbers, using 2.9 for the lift coefficient as this coefficient would allow to reach 60 degrees with the turbine.
35 degrees should mean 1: (0.8191) = 1.22 for the L/D ratio, so 696/570.
570 – 278 = 292 N, so a little more than 4 turbines (70 N X 4) in all.
Now we extrapolate from the second calculation with a lift coefficient of 1.6.
35 degrees should mean 1: (0.8191) = 1.22 for the L/D ratio, so 384/315.
315 – 153 = 162 N, so more than 2 turbines (70 N X 2) in all.
This can be wrong, so please correct me. Probably some variables should be a little different and known in order to obtain a more precise calculation.
Even only two turbines for a kite of 4 m² at 35 degrees would mean a good efficiency (power to weight ratio) of this system. And it could be four turbines. The weight (0.5 kg per turbine) is not yet taken account but looks to be low in regard to the lift of the kite at 10 m/s wind speed.
For what I see, an installation with tilted rotors would have an equivalent efficiency (power to weight ratio) in small scale but this topic should be deeply studied.
2 Likes