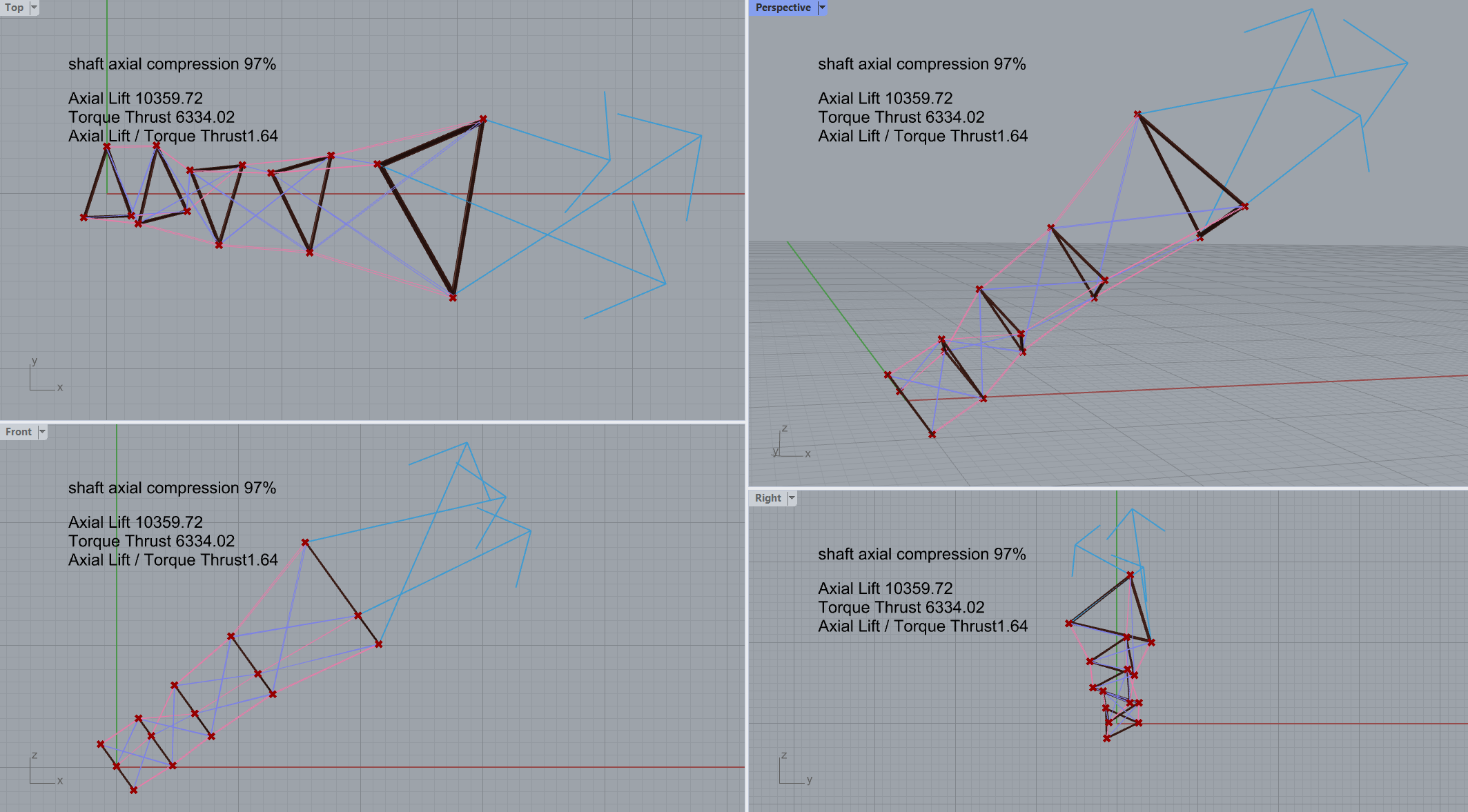
I have been investigating an idea I have had about a soft shaft for rotary rigs. I have called it the “Chanterelle” shaft, though the name is probably soon forgotten as I have not found any merit in the design.
The idea is to make a completely soft shaft with no expanding rings. But instead, add some bridles along the tethers so that the overall curvature is convex. The convex curvature then allows some more rotation of that segment before the shaft collapses. To put it in other words; the convex shape of the tether provides expanding forces instead of using stiff/compressive elements.
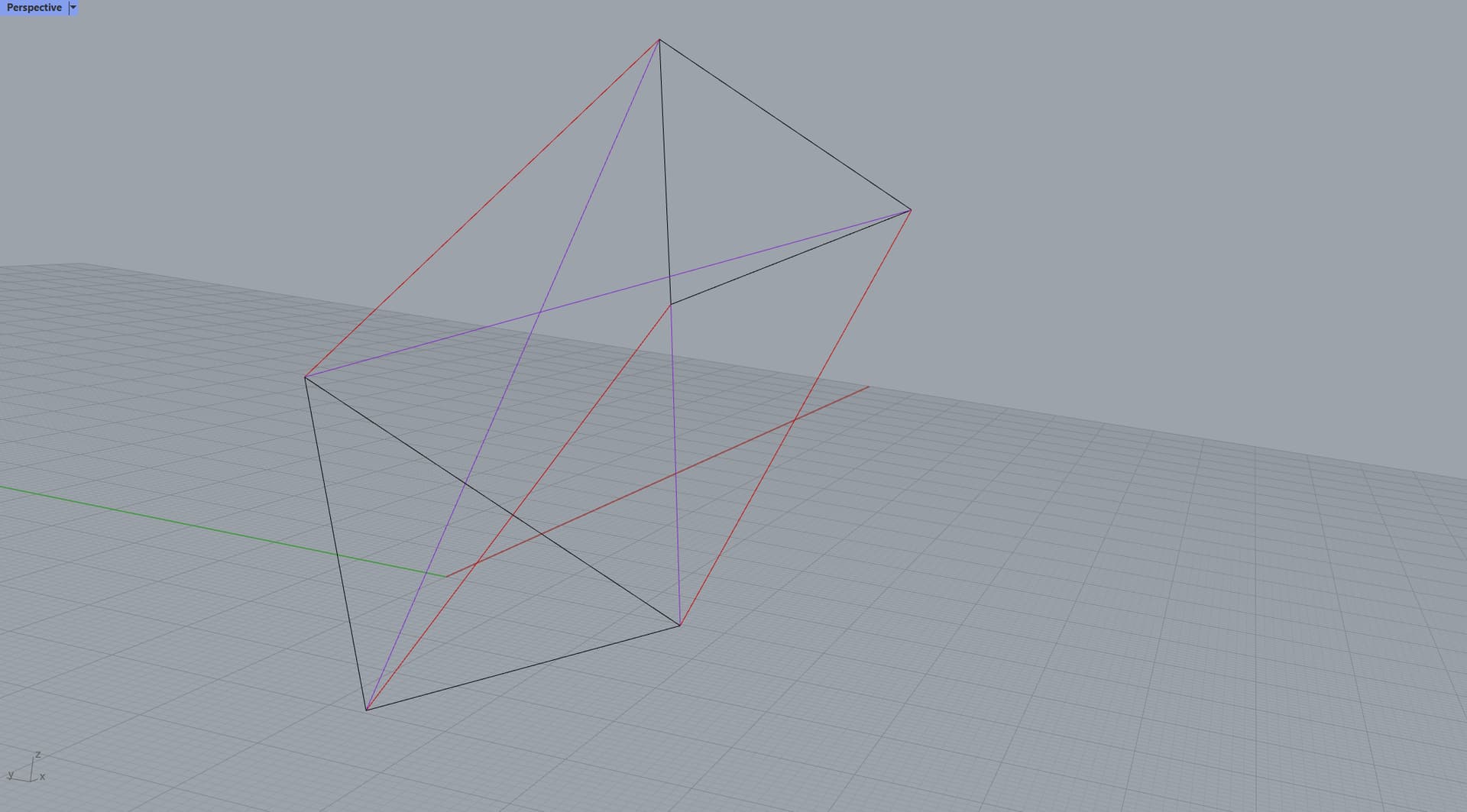
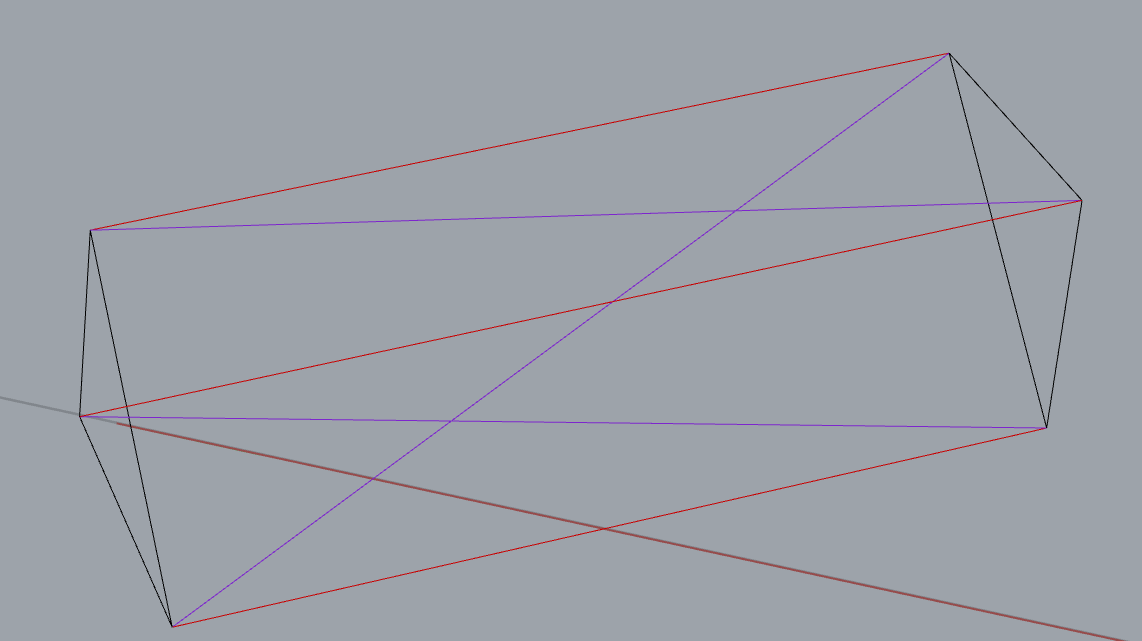
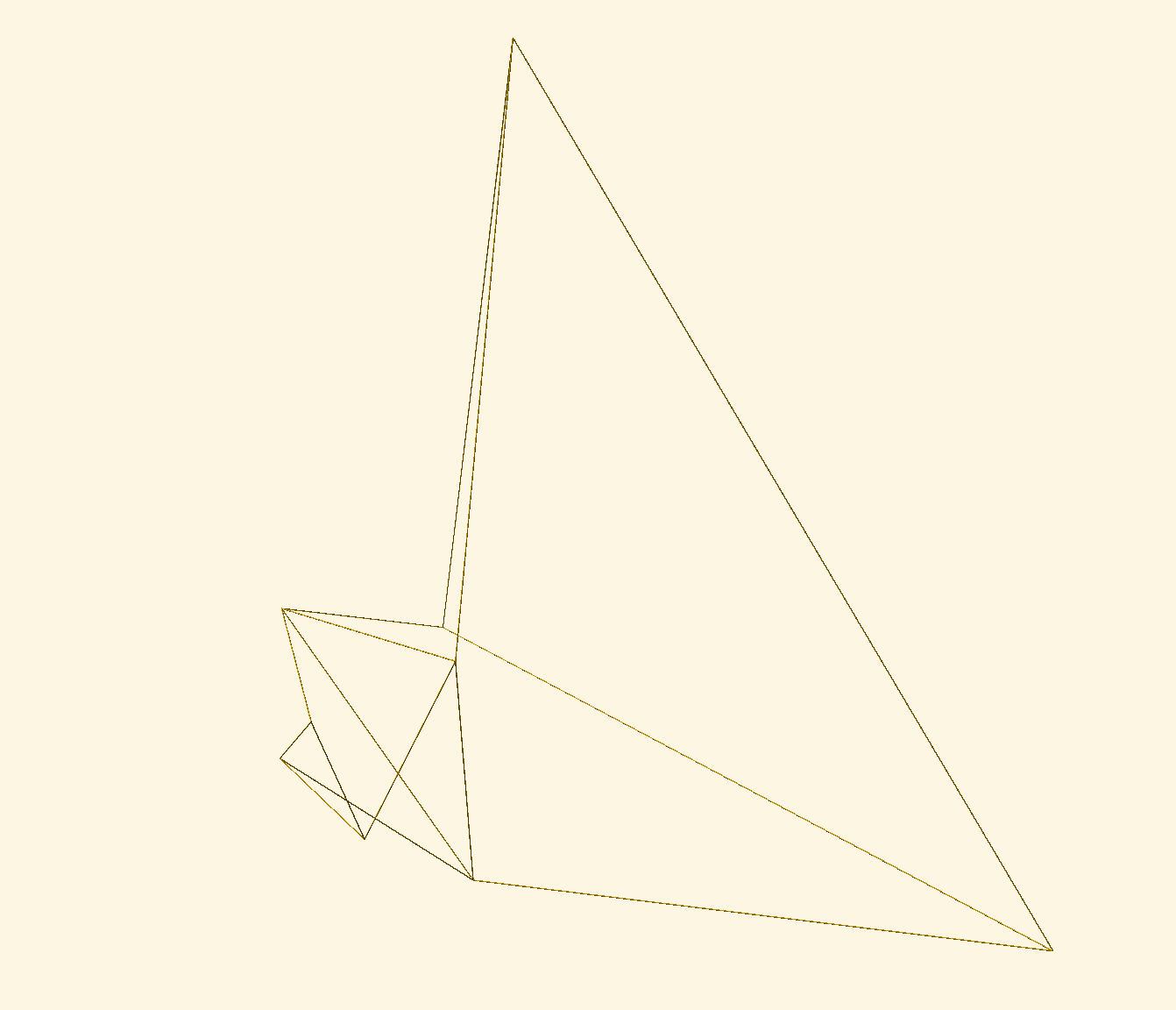
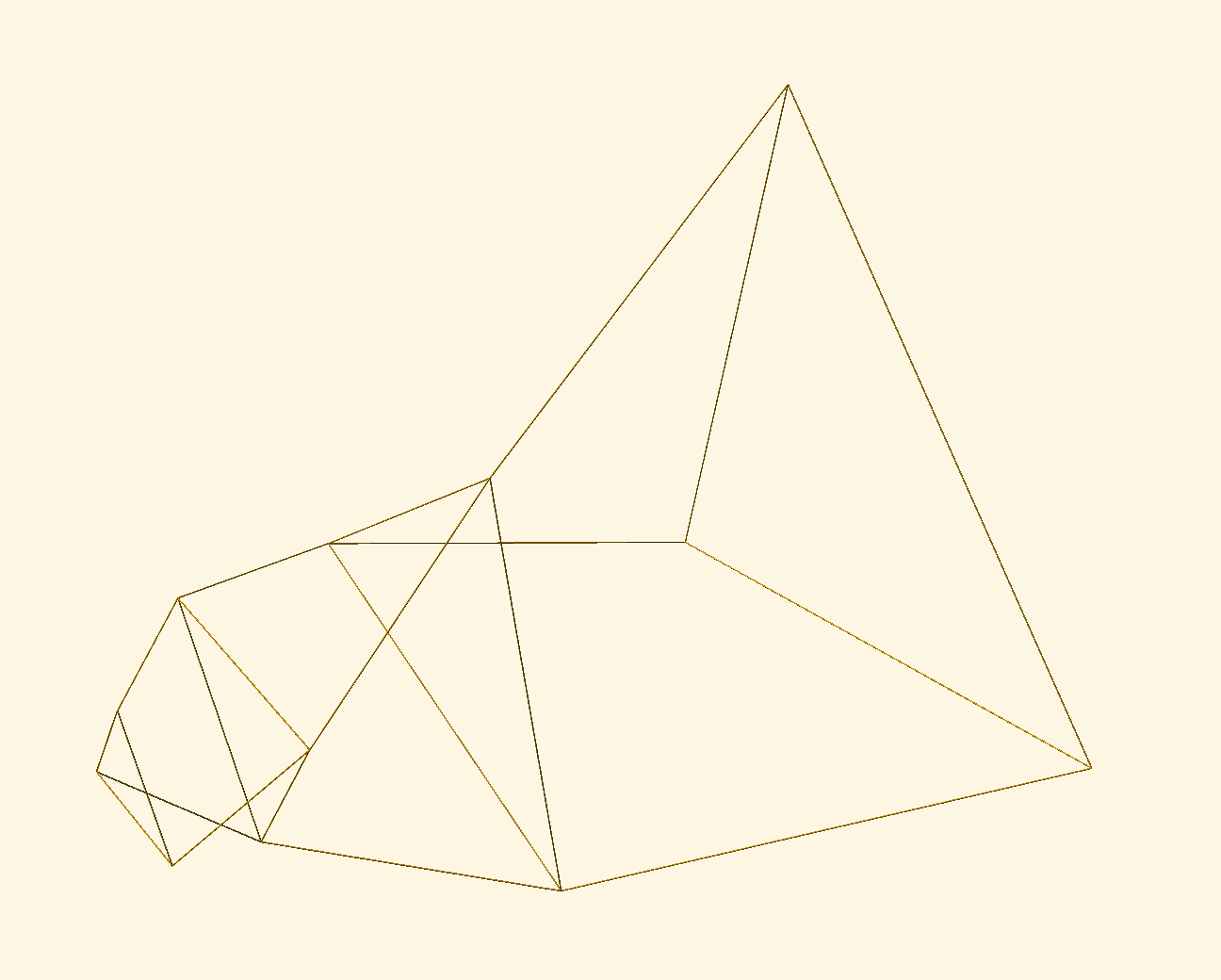
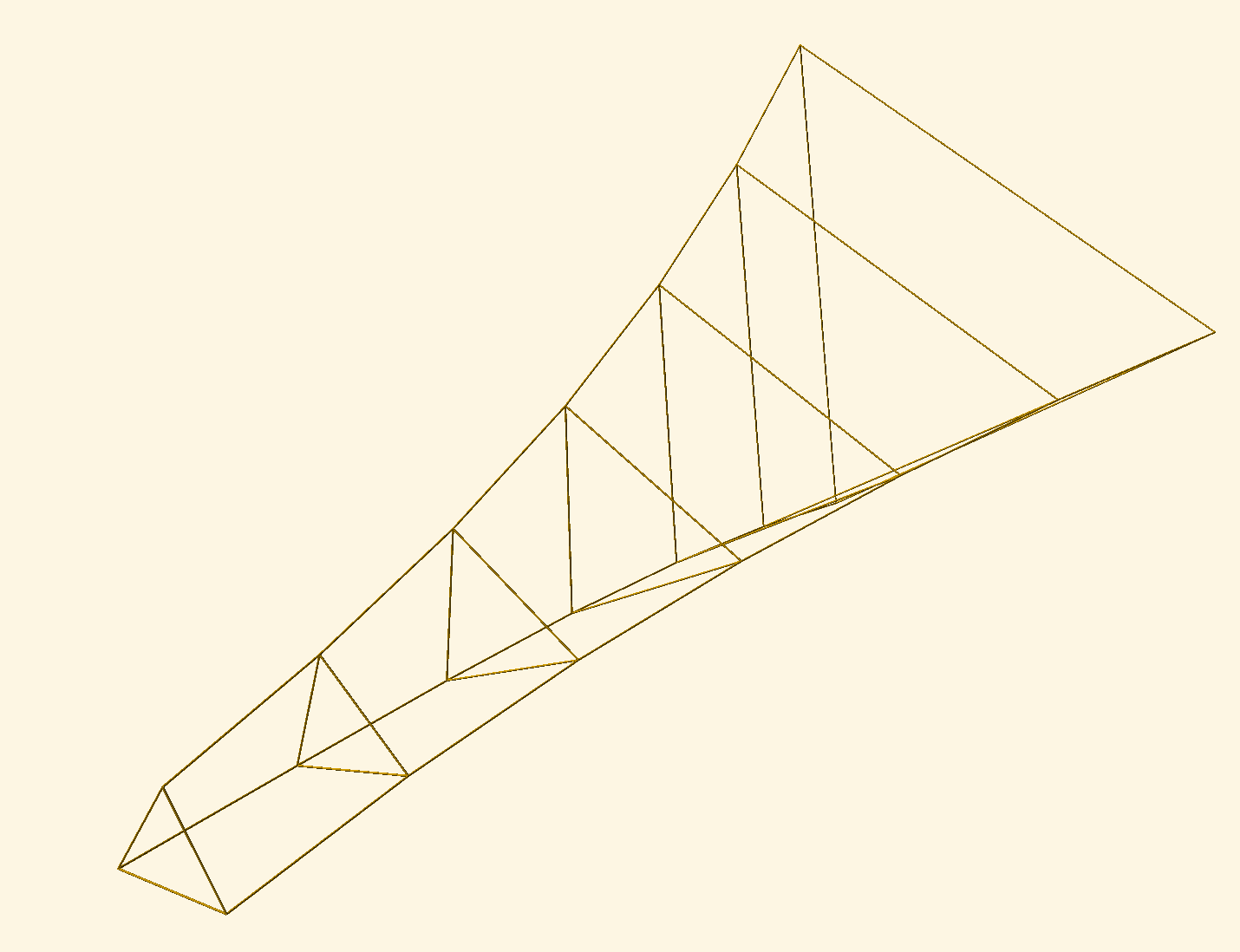
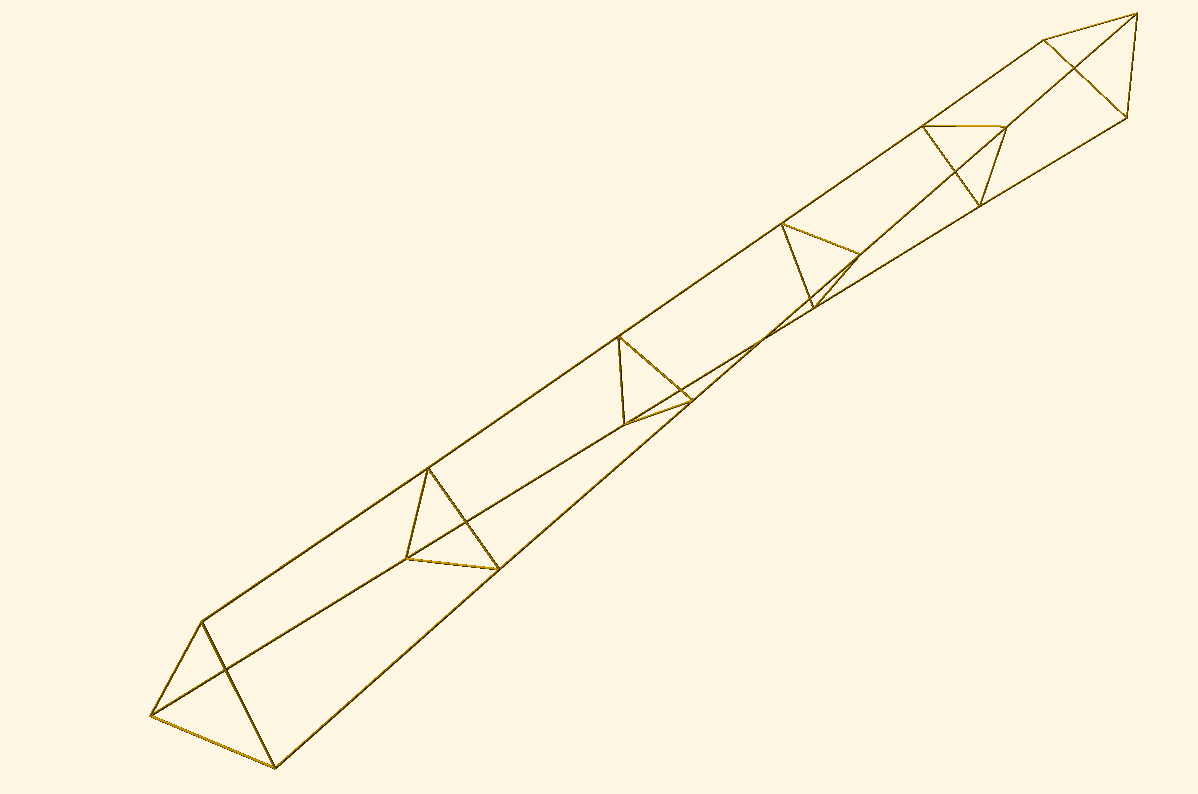
I have added pictures of a shaft with no bridles (not Chanterelle), and a Chanterelle shaft with 6 segments. The distribution of radii ensures the outline is convex.
I will not go through all my calculations here, but it is nice to assume that the tension in the shaft is constant. This means that the tether tension varies depending on the amount of twist. The tether tension could be different at different places in the shaft at any one time.
So having
- T_\perp: the tension in the shaft
- R_n: the radius of the shaft at any node (bridle, ground shaft or kite plane)
- l_n: The length of the tethers between the nodes
- \delta_n: The amount of twist between two nodes
We should arrive at a moment
\tau_n = \frac{T_\perp R_n R_{n+1} \sin{\delta_n}}{\sqrt{2 R_n R_{n+1} \cos{\delta_n} - R_n^2 - R_{n + 1}^2 + l_n^2}}
Because the moment through the shaft must be constant \tau_a = \tau_b for any a and b, this equation may be used to calculate all \delta_n iteratively from node to node.
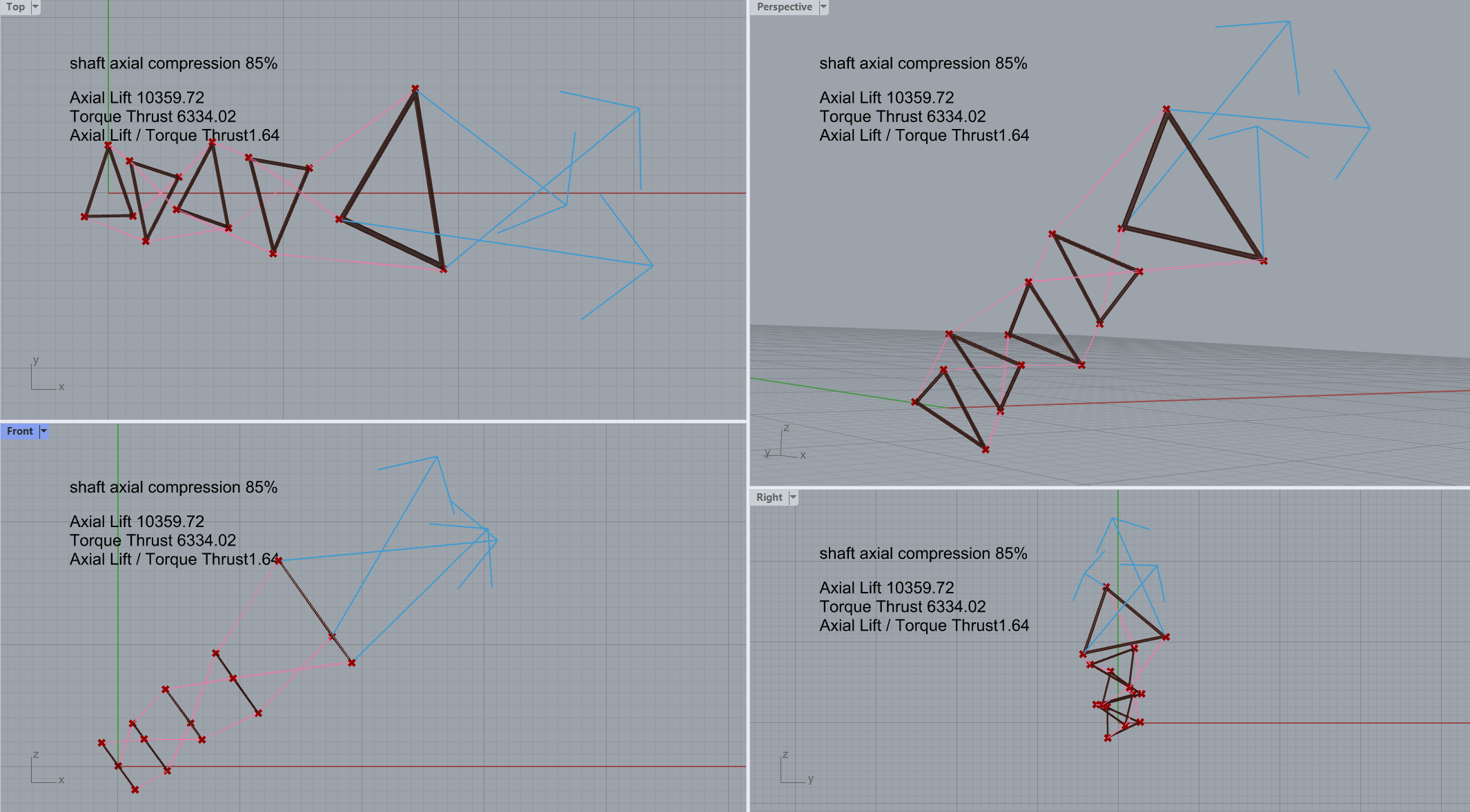
The complicating matter is that when you twist far enough, the bridle will change from tensile to compressive. In practice you must detect if this is happening and then not use that bridle in the further calculations. One can see that when all bridles are slack, we are essentially left with the non-Chanterelle shaft. So given enough rotation, eventually we will not see any benefits of the Chanterelle design.
I used a test to see if the curvature of the tether at a node is inwards or ourwards. If it is straight between three nodes, that implies that the bridle is slack. Thus if the curvature is inwards, we must disregard the bridle.
I will not go into details about how I calculated this because I don’t think it is of much interest to you. But ask for it if you want to see it (its a bit of work for me to write down and explain all the equations involved).
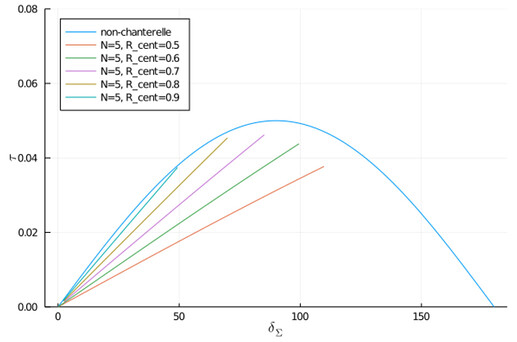
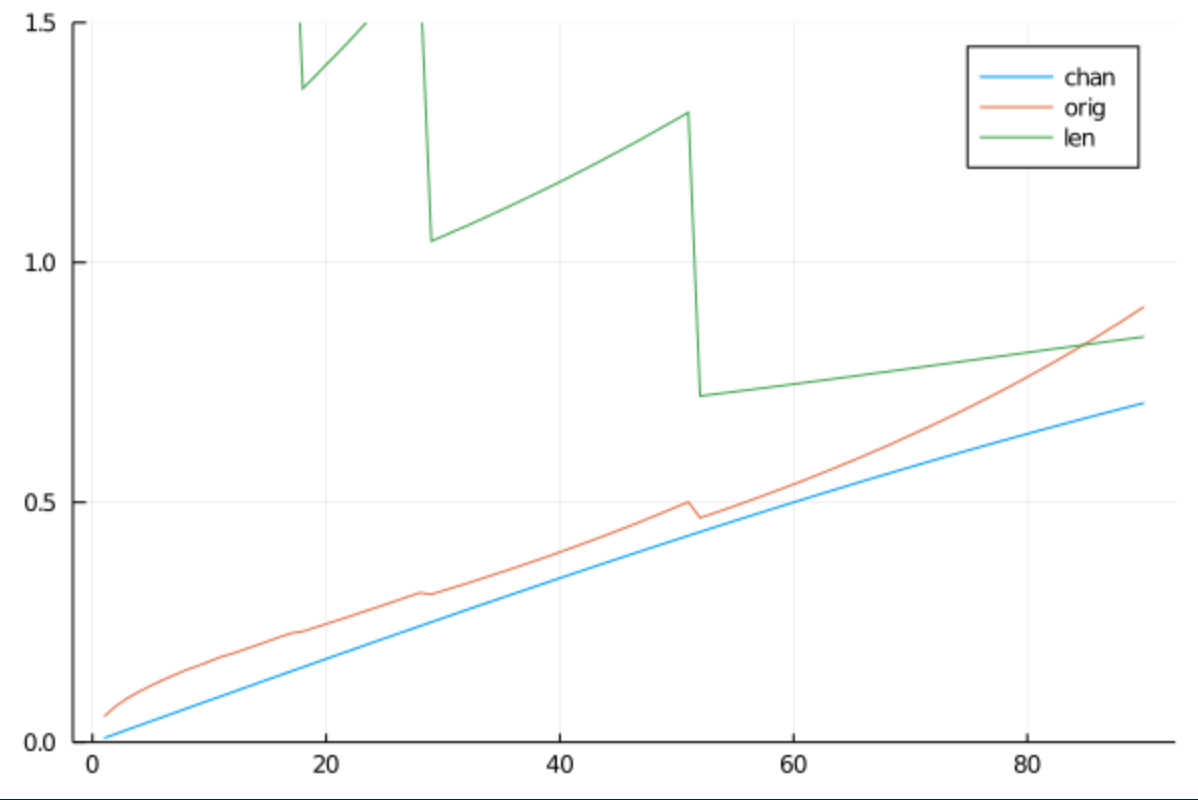
Anyways, when plotting the maximum torque vs the total twist in the shaft, the plots would look something like this:
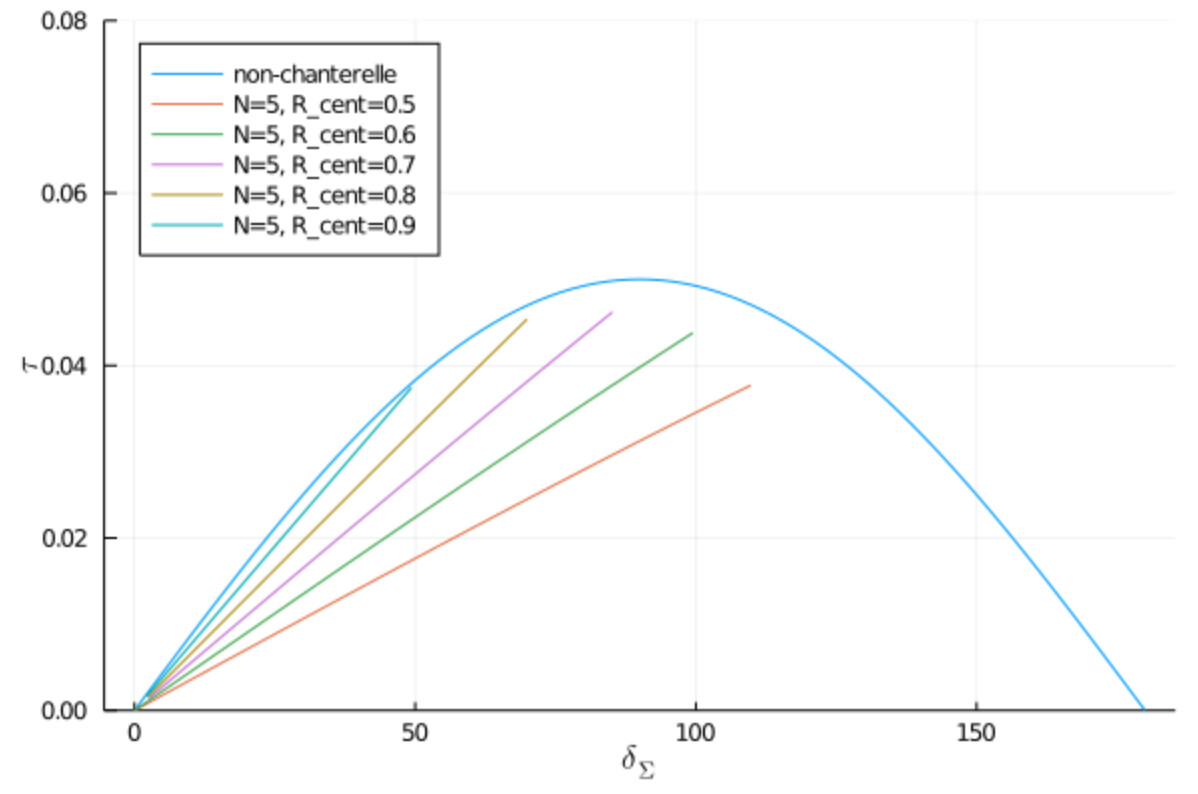
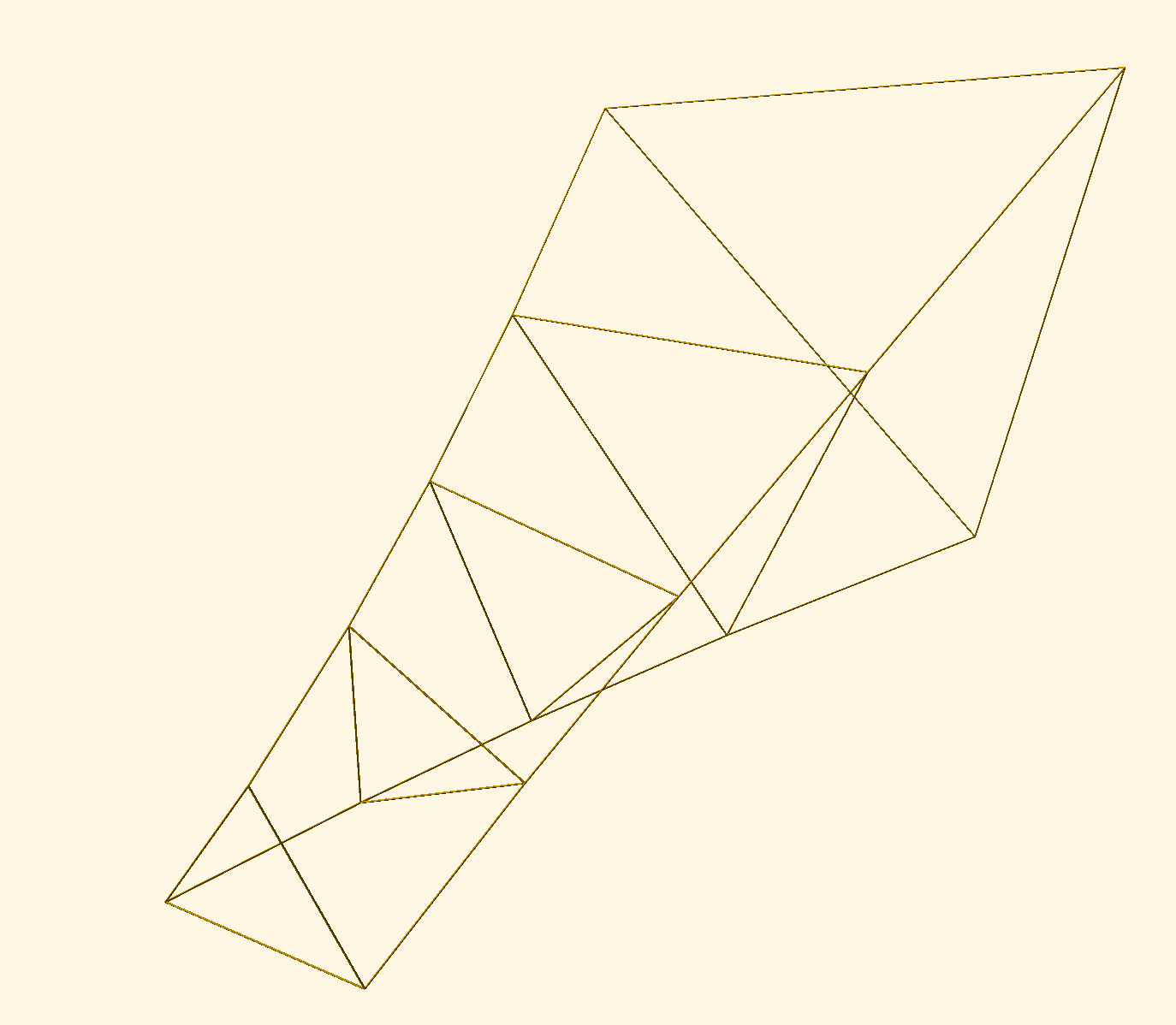
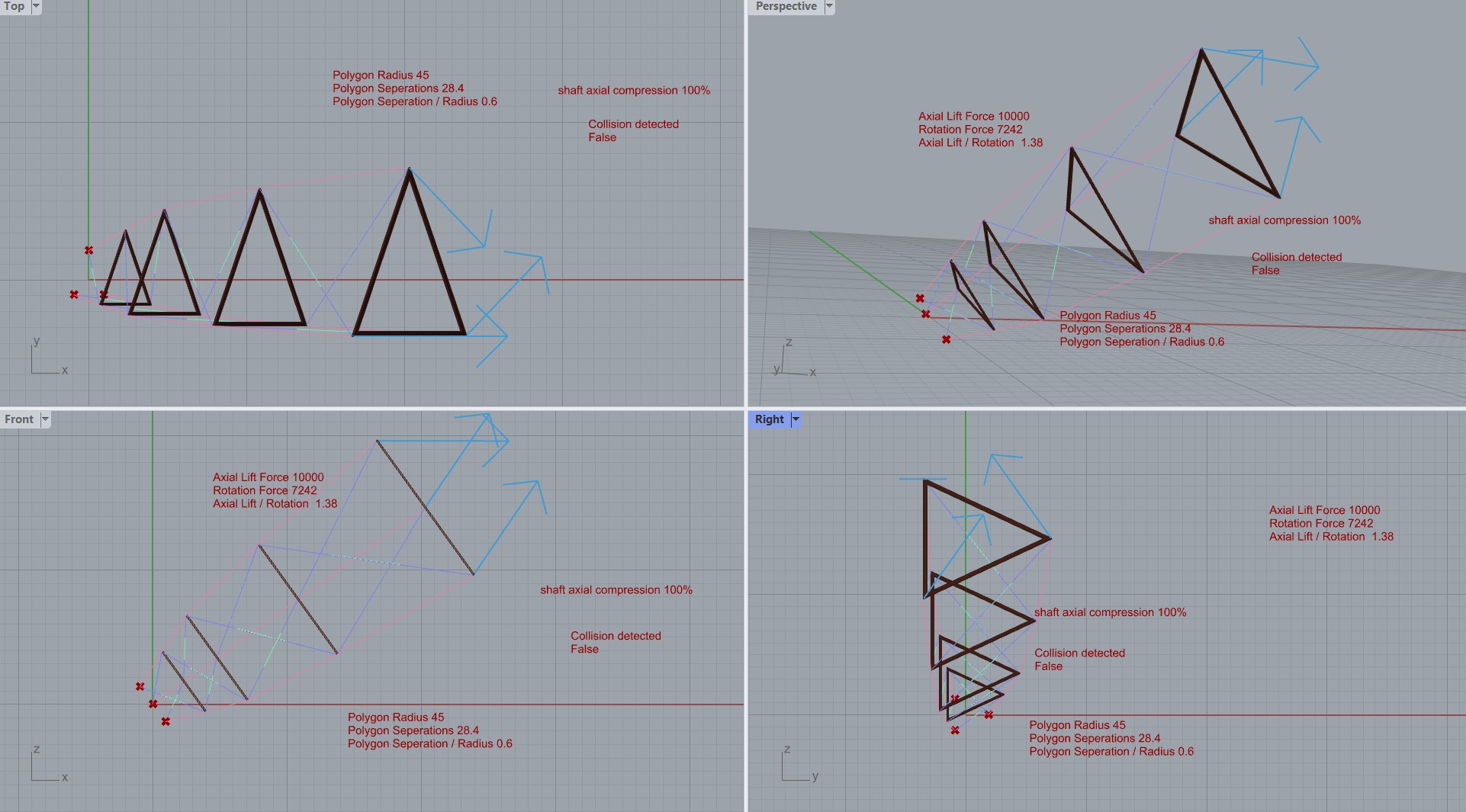
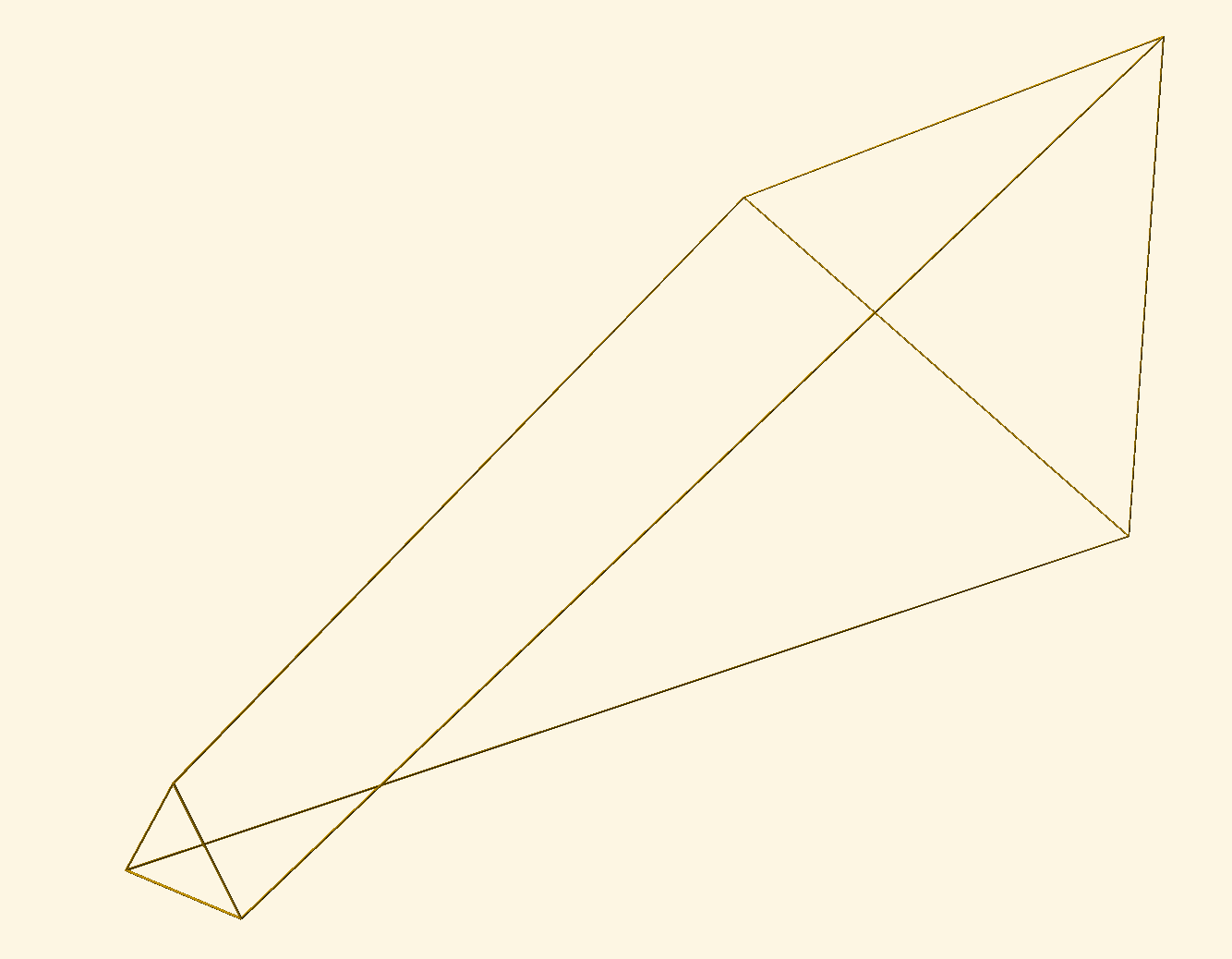
This is for a Chanterelle shaft with varying middle radius, length 20 m, radius at either end 1.0m, looking something like this:
You can see that the tethers are pretty straight at this point of maximum tension

So, my experiment ends here for this idea. I have tried a few more things to see if I could find a configuration that could increase the moment the shaft was capable off, but never found anything.
I think future useful work could involve a kind of Chanterelle shaft with compressive bridles, giving enough moment capability in the shaft, but minimizing the size and weight of the “rings”.