The wing basis of an AWES architecture must survive-to-payback to be economic. Further, aviation safety must be to insurable standards. Many complex factors determine critical safety and reliability. This topic is to summarize the current state of the subject in AWE R&D.
1 Like
This is somewhere I think Network kite designs have large advantages.
There is no single point failure mode in a network kite = safer = insurable.
The classic example was my last test where despite my poor software allowing a rotor stack over-twist leading to 7 sheared lines, there was no break-away as the whole set was held by the back and lower lines.
As for time to payback, the small wings used on a rotor stack are easily swapped out after wearing out. They are really durable, because they are small, they are super cheap so payback won’t take so long.
I would like to mention a hypothesis of similarity between the minimum altitude of an airplane, and the tether elevation angle of an AWES in regard to secondary uses.
About the minimum altitude of an airplane:
https://www.faa.gov/about/office_org/field_offices/fsdo/lgb/local_more/media/FAA_Guide_to_Low-Flying_Aircraft.pdf
(b) Over congested areas – Over any congested area of a city, town, or settlement, or over
any open-air assembly of persons, an altitude of 1,000 feet above the highest obstacle
within a horizontal radius of 2,000 feet of the aircraft.
(c) Over other than congested areas – An altitude of 500 feet above the surface except over
open water or sparsely populated areas. In that case, the aircraft may not be operated
closer than 500 feet to any person, vessel, vehicle, or structure.
About the tether elevation angle: Lift to Drag Ratio
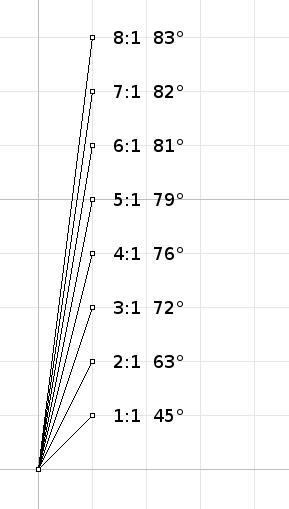
I think the angle of elevation is very important and affects the Power to space use ratio.
As an example @Kitewinder markets Kiwee which flies at an elevation angle of about 60 degrees (varying according to the wind speed), using a lifter kite of 4 m² for a turbine of about 1 m². With a smaller lifter kite, the system would work correctly but at a far lower elevation angle. I think this is a significant indication of the conditions for marketing any AWES at any scale.
It is not impossible that existing concepts and prototypes could actually become sub-systems for high lift and high elevation angle AWES. And also new concepts could emerge. I sketched some ideas in several topics, but still without significant promise of result.
Consequently networks of lifter kites or kytoons could constitute (inferior or/and superior?) bases for AWES.
1 Like
Is the minimum (as well as maximum) altitude of AWES discussed or regulated already other than on this forum? I think that’s a useful addition, just like it is a useful addition to not have aircraft fly too low away from airports.
There are some indications on Developing AWES Regulation. 2000 ft is often mentioned as a limit. I don’t know if there is updated information.
Also on an already old proposed rule in 2011 Federal Register :: Request Access :
(4) Testing is confined to heights at or below 499 feet above ground level (AGL)
Anyway, that’s not directly my point. What I mean is that an aircraft flying at high altitude has less risk of crashing (in this case over a city), just like an AWES flying at a high angle of elevation has less risk of crashing around (in the case where secondary uses could be considered). For both aircraft and AWES, respective high altitude and high elevation angle separate them from the ground environment.
It may not be completely relatable. However thought it worth a note.
Most tall buildings have warning beacons so aircraft can avoid then.
It the red light on most buildings around the world. You also have radar proximity beacons that can warn aircraft to take action.
Here in the uk most aircraft have to maintain 100ft from ground level. the last I knew. I’m not sure if the CAA over here has raised the celling. Since the shoreham air disaster. so don’t quote me on that. It now be might be 250ft?
It might be wise to have a warning beacons on all kites in flight. To make all kites highly visible, regardless of time of day. when they are in flight. Its also worth noting where the operating ceilings for kites and aircraft are most likely to come into contact. If the operating ceiling for kites cuts out at 2000ft? There still a huge margin for incident. 500ft is still range of most non pressurised light aircraft. Regional rule may apply. Also might be worth having a look at exclusion zone round airport and airfields. I believe it’s 2 miles UK for drones. That was brought in after the incidents at Gatwick and Heathrow. I’m not sure if the same applies for kites. This is from https://www.noflydrones.co.uk/

Thought this might help give people a clearer image. By all means do your own checks. But as an FYI it’s a good start.
Dirty
You cut Shetland off
CAA Air Navigation Order CAP393 if I remember correctly has the regulations on kite flying.
EASA regulations with regard AWES have been addressed on the forum before. There is an AWEurope task group advising this I think
Not sure that always follows… High L/D performance wings are twitchier and easier to overfly into a nosedive stall if their job is staying high.
I recommend not flying your turbine at less than -5cm AGL
(Does that now become BGL?)
Seen turbines doing a bit of trench digging without sustaining damage but it’s not to be recommended.
Sensible lifter matching + control and Backbot with a mast should help us prevent this for upcoming tests. (long way off still)
But I do believe there were Kite Turbine tests being performed in Spain this week
I thought about similar AWES, in this case static AWES. For example for Kiwee the risk of crash is lesser if the kite is 4 m² instead of 1 m², and accordingly flies at a higher elevation angle.
I would add that static kites are easier to manage than crosswind kites, the crash risks and their consequences being lesser. It is the reason why we see “stacked” static kites in Kite festivals, the crosswind kites flying in a special area with nothing around.
Static kites are great but without being active or supporting active kites… They would be useless for AWES.
A 4m static kite breakaway is worse than a 1m static kite breakaway. Networks allow multiple small elements to be deployed in relative safety.
Networks do tend to stabilize and reduce control needs. They also allow denser deployment of kite numbers over a given ground area. Stacking networks of kites and coordinating all of their activities is likely a very good solution space for the problem of ground use.
I’m often tempted to sketch more active kite network scheme drawings…
Maybe something like a swirling stack tied to a pair of stacked ring rails on the ground… Between the rail stack a Pip Squirt wedge shaped trolley holds the rails and is
Driven by ring swirling… But I’m not sure if kite network lifter stack swirl motion would drive that…
Going to stick with turbines for now until I know anything better…
I’d be delighted to see anyone translate cowboy lassoo rope flinging tricks into a working AWES
At high angles the risk of overshooting to the windward direction increases, especially if the wind lulls (slows), which can cause a kite to “fall out of the sky” right onto your head.
They would like this in Texas, a major wind energy hub. Most “Cowboys” are actually Mexican, and according to some, the word derives from “Caballero” which is Spanish for “Horse Person” with Spanish for “horse” being “Caballo”. (in both cases the “ll” is pronounced like the letter “y”).
Between 50-60 degrees and 90 degrees the margin is significant. Static kites (usually flying at a much higher elevation angle (50-60°) than crosswind kites (30-35°)) are not often seen dropping at kite festivals.
Networks can be great, but undergo tangle risk.
I thought about static kites carrying turbines in Kiwee way.
A network of kites as I see it reduces the risk of tangling. Fixing the positions of kites with multiple connection points onto a net with wide tethering will stop them wrapping around each other.
If you tied multiple single line kites together and called it a network… Yeah that would result in a lot of tangling.
You raise a good point. I experimented my rotor with tied wings, and it did not work well (before possibly tangling).
And a multi-anchored network of kites remains an option for experiments and studies.
This video at ~ 5.09

makes me think… The elevation angle and height of a stack of turbine wings tied together could be really high with a lot of control on each blade…
Just as well I’ve never been to an event like this… I’d surely get in trouble for tying 100 paraglider pilots together.
1 Like