The reel-in phase consumes a lot of time and energy. Also it would be interesting to be able to drastically reduce the traction of a wing during the reel-in phase. For this, it would be necessary to be able to vary its surface area, and in particular to reduce it in order to have just what is necessary during said reel-in phase.
Currently I see two options:
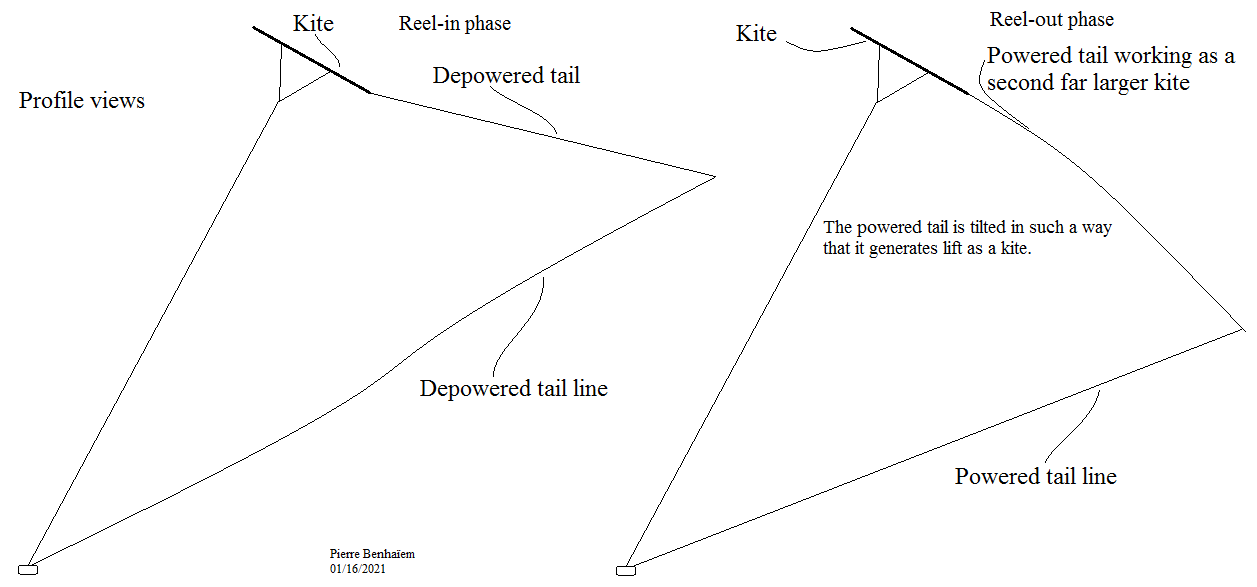
Using the tail as a large powered supplement. This idea came from the video on:
I experimented some configuration with an alternately powered (for reel-out phase and depowered (for reel-in phase) tail. The kite area was only 0.2 m², while the tail was 3 meter long and 0.5 m meter wide. The wind was 3 to 9 m/s. The elevation angle reaches 15°, not more. When I pulled the line commanding the tail, it provided significant additional traction, but, as expected, the elevation angle of the set was lowered horizontally, and the tail in traction was not stable.
A sketch and a photo are below to help to understand better:
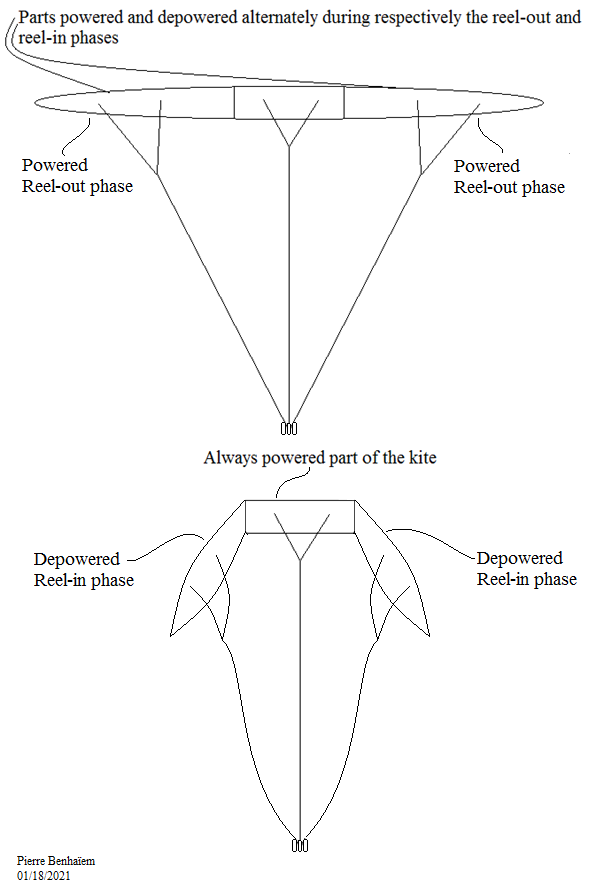
The second option is addition of a bridle and a line for the central part of a power kite, which central part remains the only one permanently powered. I experimented this with a 0.6 m² power kite, the central part being about 0.1-0.2 m², wind speed 6-9 m/s. The three lines were about 12 meter long. I held the middle line by the teeth then let go of the two control lines when the kite was immobilized at the zenith. The kite was deformed and slowly descended with stabilization stops for a few seconds with low traction, instead of falling. It is not terrible but it’s better than nothing.
A sketch and a photo below:
Nice tests @PierreB
Just don’t tell your dentist what happened in the second experiment.
Whereas I really like the idea of a large area kite used for pumping mode
Grabbing a long billowing kite tail end really changes the flow over the whole system, stalling some of the upper parts and often sends a single line kite into a dive or loop as the centre of lift is shifted way back.
Also the more standard power kites get a much higher airflow (Power) from their crosswind movement than a large sheet would get.
The TU Delft (LEI Leading Edge Inflated) soft kite traction cycle uses a pitching control to reduce lift for recovery.
The write up is in AWES Book1
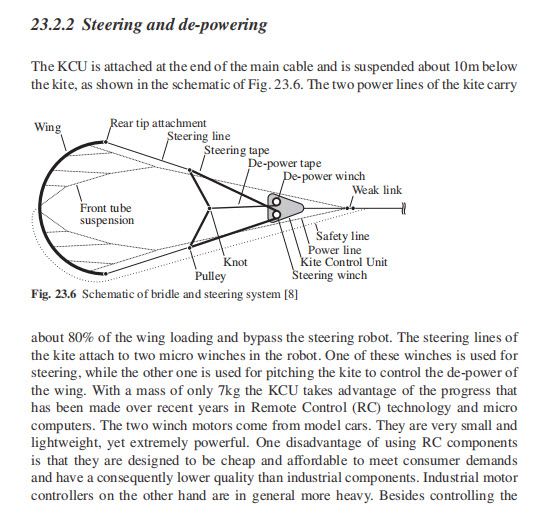
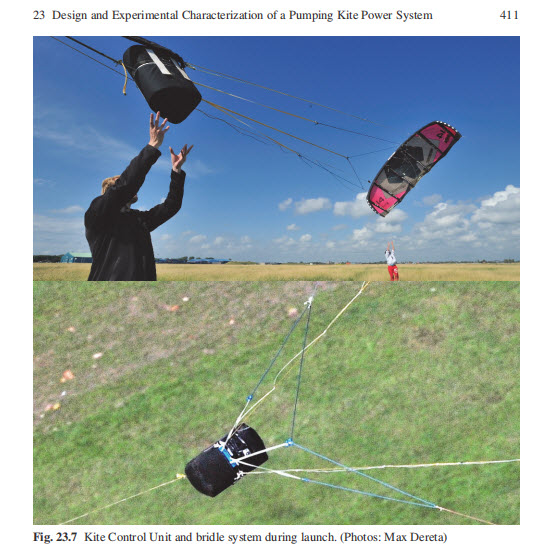
Chapter 23 Design and Experimental Characterization of a Pumping Kite Power System
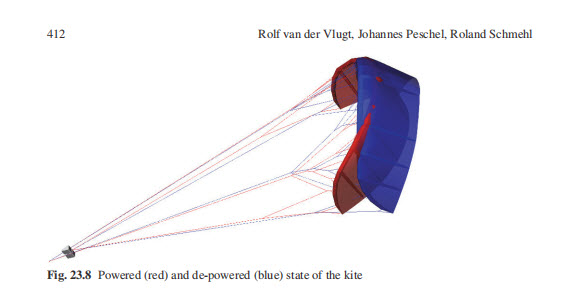
Rolf van der Vlugt, Johannes Peschel, Roland Schmehl
Hope I’m not breaking any rules … let me know if so … I’ll post a screenshot of their effort here
Thanks for the information @Rodread, but I think even when it is depowered the whole kite generates too much traction in the reel-in phase (see the curves) and during more than half of the time. If said time is reduced the traction increases a lot. So I try to investigate some means in order to reduce the working kite area during reel-in phase, the large depowered part working as a flag or even stabilizers. I will pursue the experiment of the second option but using only the middle part for now: if I obtain something acceptable I will add the two power lines. If that works a pod (of type KitePower or SkySails) gathering all lines would be more appropriate to mitigate drag and avoid tangle.
It’s a good concept @PierreB transforming the kite to work with just the centre cells inflated while the sides are flagged out for recovery mode.
Then reinflating the full kite for traction.
I much prefer this idea of your method @PierreB to another idea for kite recovery area reduction…
the sideslip recovery method proposed by Massimo
Some experiment today with the small power kite (photo above): 5-10 m/s wind speed, the kite held in the middle was very unstable, turned on itself and turned around, sometimes rose a little to fall. In this kite the cells are more or less common in all its area. But I think the main problem is the wind resistance and instability generated by both depowered sides.
Ideally, the depowered sides should behave like stabilizer tails, but this is not the case at the moment. I think a specific wing could be studied.
Concerning the option with the powered tail (for a static kite), perhaps it could work if the tail is in fact a sort of parachute with inherent lift and working as a tail while it is depowered.
So in the end the difference between the two options could perhaps be lesser as expected.
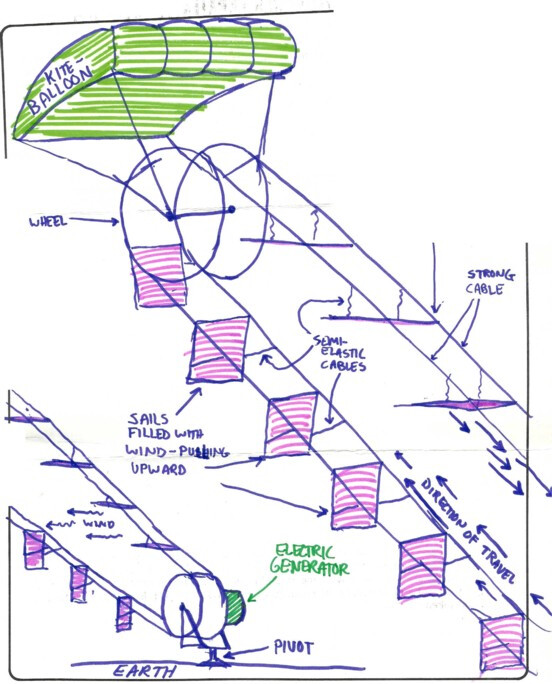
Seems to me that the “laddermill” concept provided an effective reel-in phase orientation, while eliminating the intermittency of a separate reel-in cycle.
Hi Doug: in your website, on your drawing below, the sails pulling are settled below the depowered sails. Wouldn’t it be better to reverse? Perhaps some risks of tangle would be mitigated (above all if I use kites with powered tail), perhaps pulling sails would benefit from better fresh wind, perhaps also the top cylinder could rotate in a suitable direction to provide additional lift from Magnus effect as for something like a Sharp rotor or even a simple inflatable (or rigid but light) Magnus cylinder, by using the two end disks also for the passage of the two ropes.
@dougselsam I am looking at your page. You have indeed achieved interesting results. I was wondering if I could ask; seeing how far windmills scaled and the price of the energy that led to, do you still think many blades on a pole/long shaft is the way to go? Because handling those at 150 m diameter scale would be a handfull for sure.
Hi Tallak: The reason for SuperTurbine™ is to combine the power of many smaller rotors, which enjoy a higher native RPM and less blade material per unit swept area. And airborne would be just one possibility of many for support. As an experimenter, I tend to work at a small scale, but I would not necessarily rule out any larger scale. With regular wind turbines, yesterday’s improbably large machines are today’s obsolete small machines. Every time someone builds a larger machine, someone else wants to make one even bigger. There is that famous cube-square law to deal with, so I guess it remains an somewhat open question.
Hi Pierre: Well, normally a kite stays lower as you let line out, and rises when you pull line in. But I wouldn’t rule anything out ahead of the fact. Many variations could be possible.
Hi Doug: this is valid when the kite is still flying at full power. But in a “Laddermill” there is the return where the kite is depowered, generating more drag than lift (both being reduced), leading it to go lower?
Hi Pierre: I don’t think so, but as I’ve said since the “laddermill” concept was first “rediscovered” and popularized by Ockels and UDelfts, as long as nobody bothers to build one (it would be too hard!) such basic questions could appropriately be asked.


 in the second experiment.
in the second experiment.