Does torque transfer over a network of tensioned hoops scale better (better power to weight) than over a solid shaft?
I believe so
Because the lines are soft, we don’t have to worry about huge torsion in the shaft. Shaft deformation is not a problem.
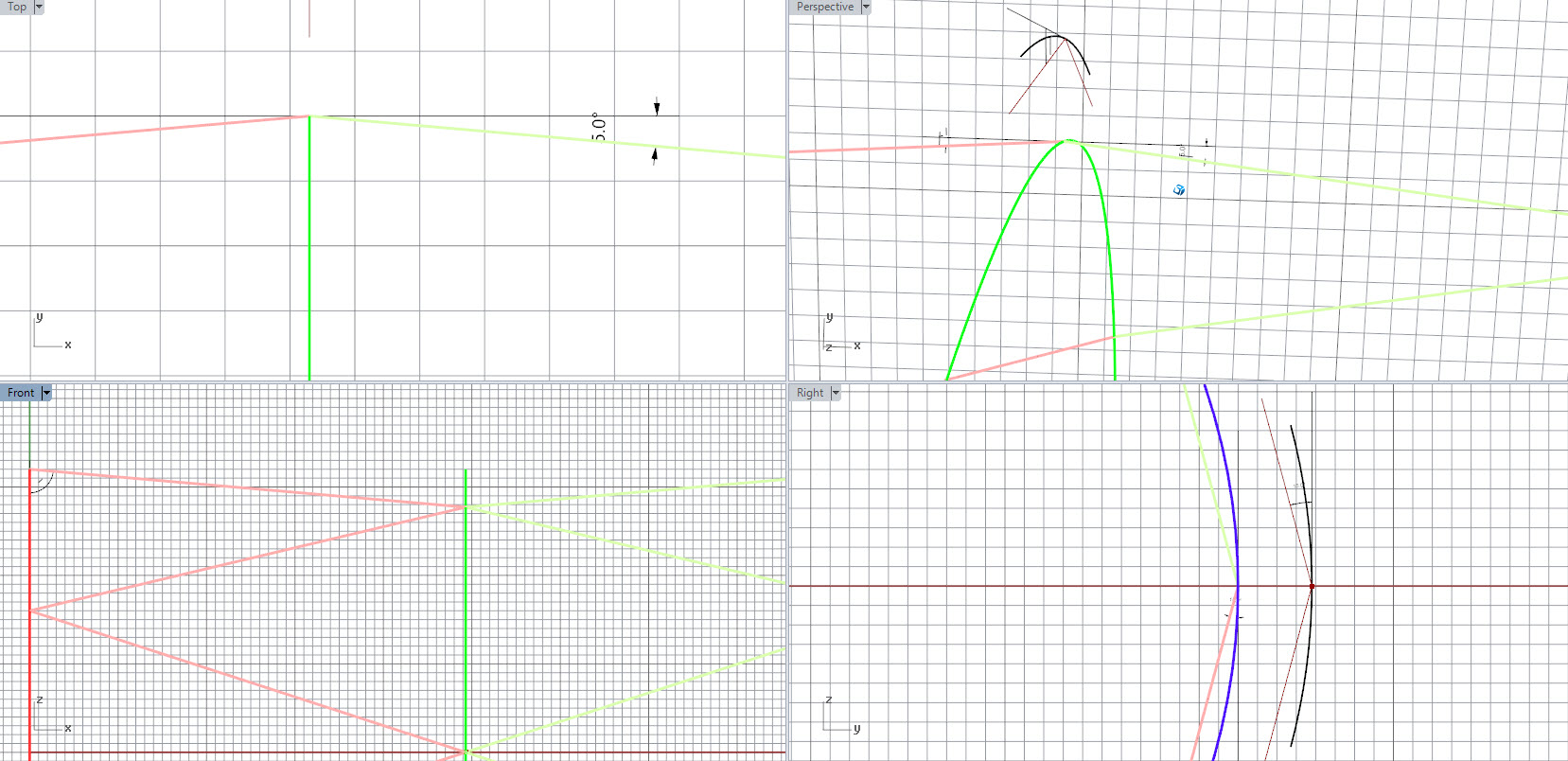
Get the ring to ring geometry right so spacing is less than diameter. The twisting problem is done. In the unlikely scenario of more torque than lift it comes downward. Excellent.
The benefit of high tension combined with wide diameter and multiple lines, means lightweight hoops can easily withstand the compression of torque.
Polar moment of inertia only needs to be addressed at stepped intervals, a solution which no solid shaft uses. This enables scale.
This will surely become especially apparent with better hoop sections than I use and with gridding for rigidity
How high could you go before the weight of the torque ring becomes an issue. I know its a very open question, but eg. for 50 kW we should be able to go x meter above ground in 8 m/s wind
50kW will have a weight / length depending on the diameter specified and the sections used and the number of lines/ring… Notice that more lines and sleeved connections means less localised compression on the rings… And they are best not to be perfect rings… So not only that but…
? Can you also feed a smaller diameter shaft through a lifting kite? If so, you can add lift along the line as you go.
Bit of a cop out answer…
So in the test, these rings coped without any obvious deformation. No idea quite how much compression from line tension they could handle. Answers please…
I’d guess speed wouldn’t be much over what we had, … As kite ring diameters increase rotor rad/s will decrease meaning more torque needs to be handled to scale power. See How a sky serpent shaft can scale up?
The relationship between geometry and capability is being investigated… @Ollie is doing the PhD.
I suspect we don’t want to increase the line count much as thicker lines are more efficient if they are working at significant length. Fewer lines also means a steeper angle between load points (on the hoop or polygon ring) thus more efficient material compression. ~= better scaling potential … this is why @someAWE_cb uses straight rod compression in his tensile shaft.
Wider diameter shafts handle torque better and torsional deformation isn’t a problem… So it all comes down to not overloading the ring sections in your stack from the bottom, which should be easy enough with good monitoring… Assuming we model how much compression a given ring (or polygon) can handle.
How long the shaft has to be… well it doesn’t really need to be long… And the weird thing is you can use some of the energy transmission to drive shaft expansion kites lower down on the shaft…
Needs plenty lift.
It’s all a bit up in the air still. Oh ho ho ho
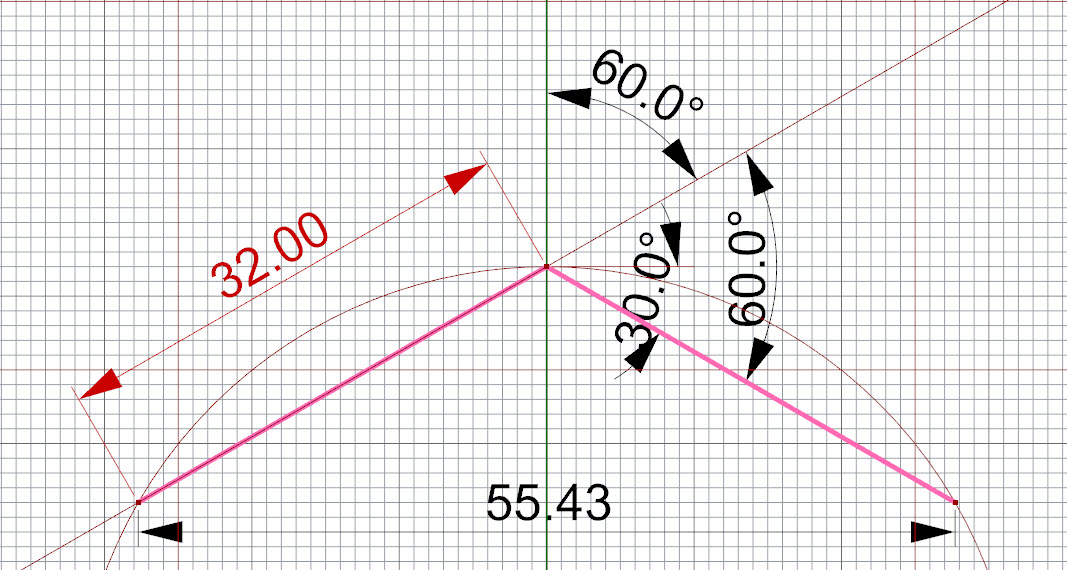
If we look at ring compression using 6 rods in a hexagonal polygon instead of a ring … it’s a whole lot easier to work out.
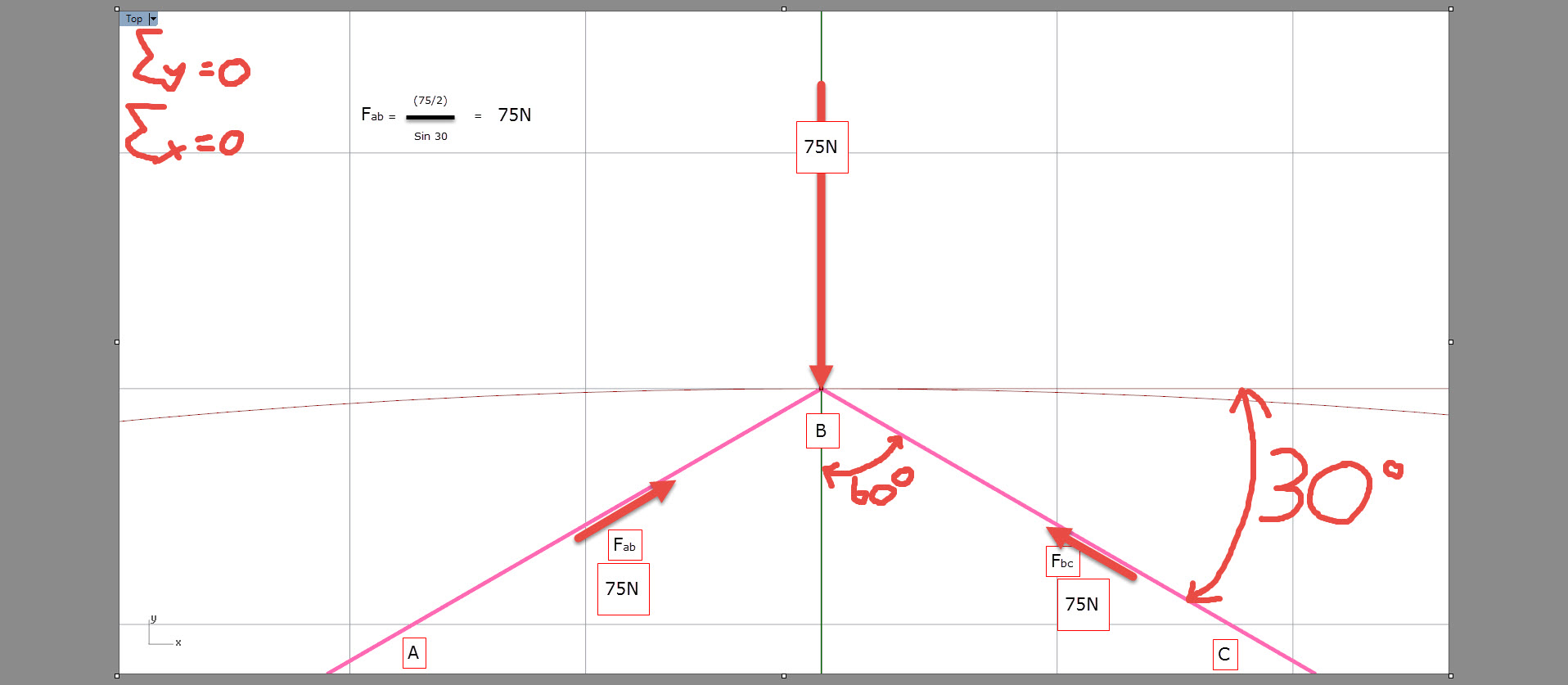
Basically each beam takes 1 x compressive load of the 75N compression from the lines…
Of course this was a very dynamic situation and so this is hugely simplified.
Maybe if I put more spoke ties from the ring cuff to centre… They definitely helped stiffen up the rings
4mm diameter of carbon epoxy (straight not woven) handled this no problem.
If only I hadn’t bodged my first attempt at inline force sensing by using rough methods and cheap strain gauges… I might be able to start controlling and testing this… #needssponsorship
That’s 75N at the B end of AB going 60deg inward and 75N at the B end of AB going 60 deg outward.
I reckon when pure beam sections go, it would be a very fast buckle & snap
Does this compressive symmetry hold true for any polygon?
OK … Think I had that totally wrong…
Here’s a model of 100N loading radially inward on each polygon node from 3 - 9 sides
Fewer rods being more efficient like @someAWE_cb has pointed out
but with advantages of stability and handling diminished.
This still tells you sod all about the torque&
Here’s where I might be really wrong…
Is this showing that there is no bending on a radially compressed polygon beam?
While you’re at it, I’d like to mention my preferred solution, which hasn’t really been tested: It is shafts alternating by 90° on parallel planes connected by four tethers at each endpoint. It looks almost identical to the OTS, which just has a bit more lines. Having fewer lines makes sure that the remaining ones are under tension, which is vital.
I haven’t really followed this thread, but if it fits, please consider it!
I think this is correct…
There’s no bending moment on the beams in a radially compressed polygon
There’s going to be plenty shear force and this only considered in plane forces… so uneven loading , wobble, gravity … will all affect this… but from even radially compressive loading in plane, there is no bending on the rods
Alright, alright, alright Luke: You finally got me to cut my 4 stabilizer tethers…
Result: this makes the shaft really unstable. The rods now can get into an angle <90 deg to the rotational axis. As soon as that happens your shaft will fold into a zig-zag line. The same effect that you get with a simple torque ladder:
I can’t show the exact moment that happens since I can either apply torque OR hold the camera
I will make a nicer video (how about not vertical ) one of these days.
If you want to reduce the number of tethers of an OTS I believe you could get away with omitting the two counter-helices and keeping the four stabilizers. I would try but I just destroyed a perfectly fine OTS, just to prove a point
So the difference here is OTS uses a tensegrity principle. Linking rods in compression between tensile lines. This way the rods can be held in free space by the lines and the whole set can transmit force.
A torque force in this case. Great when the whole set is pulled and spun… which is just what this kite wants to do… sweet.
Please can someone (@someAWE_cb …?) make a power transmission sub topic for OTS Open Tensegrity Shaft)
It’s interesting discovering the differences between the 2 very low-density shaft design types.
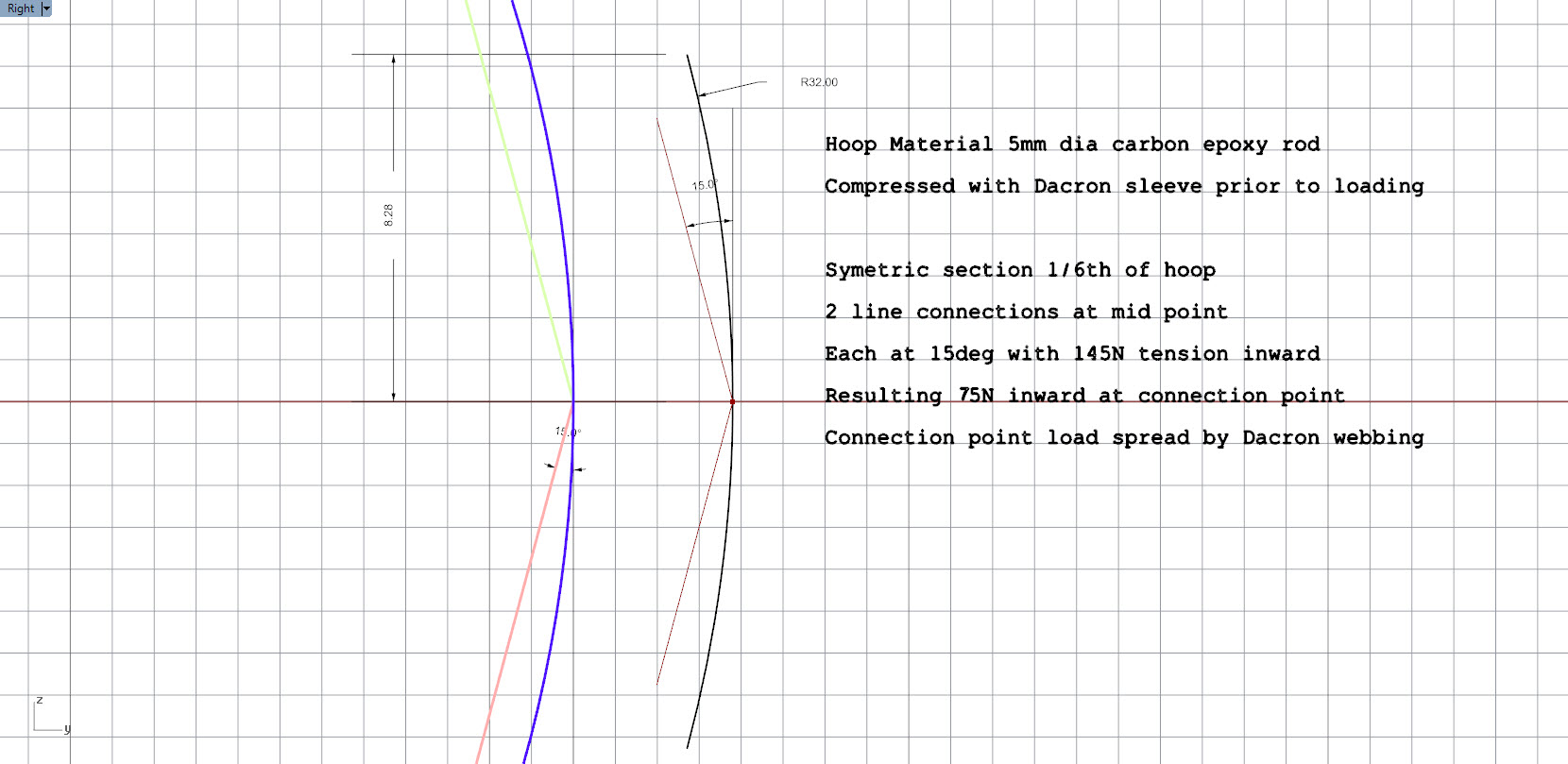
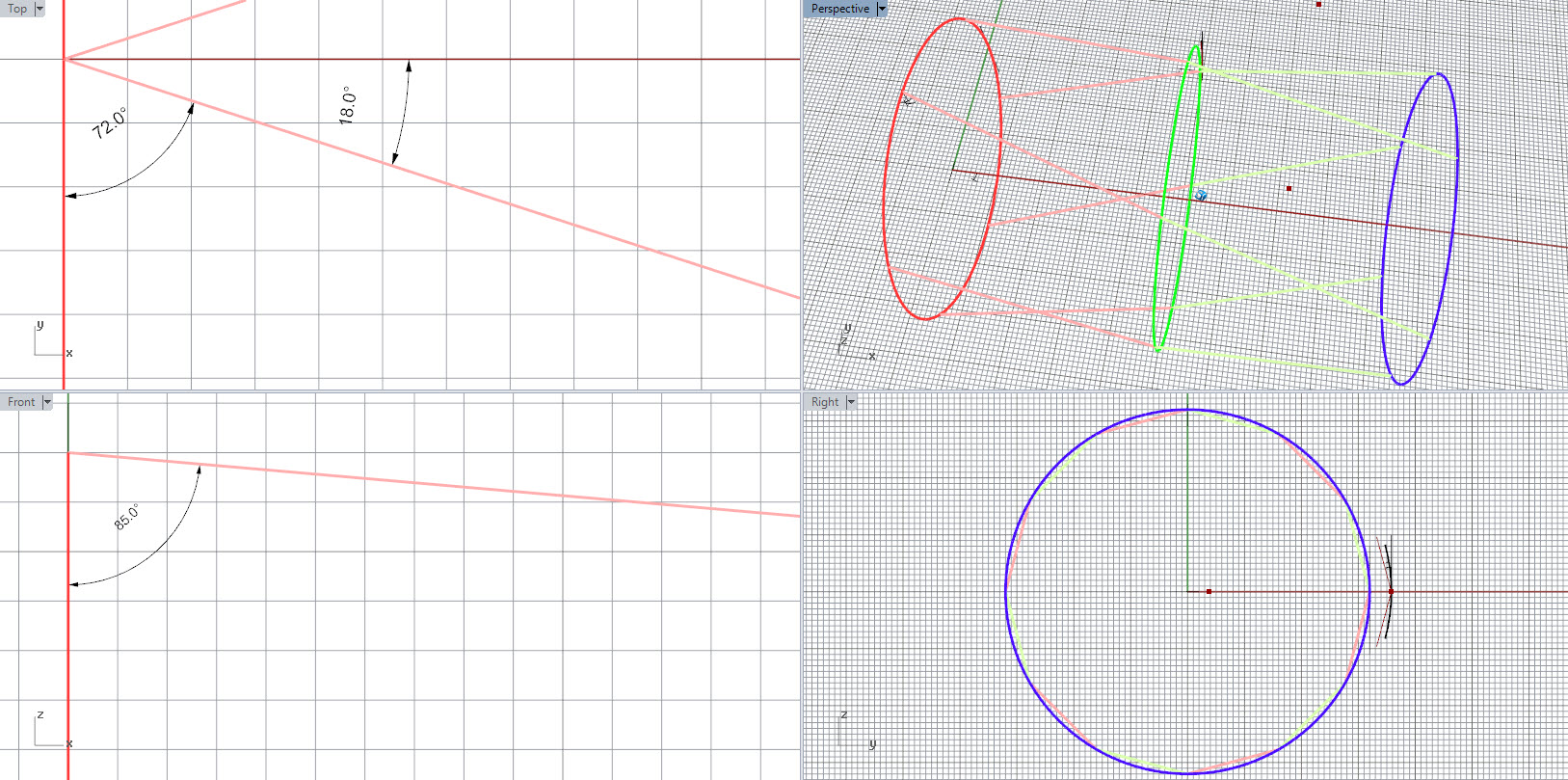
In the case of Daisy and where this thread topic started … It’s a hollow shaft design using hoops linked by lines around their perimeters
In the video, you can see it working with as few as 3 lines from perimeter to perimeter…
You can also see it fail this way when too much torque for the line tension is demanded from an out of plane power-take-off wheel.
The failing ring had 3 lines top side 6 on the bottom side. and was made of 2 x 170cm long 4mm dia carbon epoxy straight fibre rods sewn into a dacron sleeve
I wonder if we could combine @someAWE_cb’s OTS and @Rodread’s Daisy, using OTS as the central shaft within the hollow inside the rings and their peripheral lines. Perhaps more torque would be transferable, saving weight.




 ) one of these days.
) one of these days.

