Yes, arches can be added to the “exception” of “rotating sets” I mentioned. So “rotating sets” and arches are no more exceptions. Perhaps we can try to see what kite networks require each kite to be (more or less) autonomous like these kite trains or kite groups I just mentioned, and others, and what kite networks require the contrary like arches, rotating sets, and others, and why. Multi-anchor for arches and some possible other kite networks may be a reason for this. We are far from knowing everything and having experienced everything about kite networks.
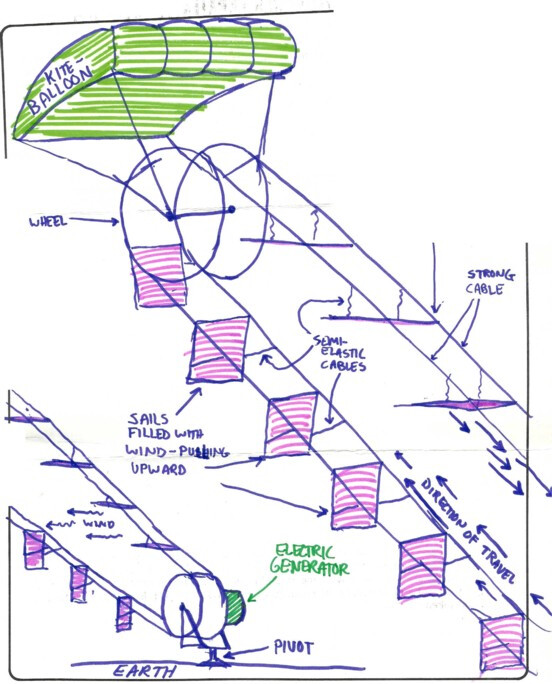
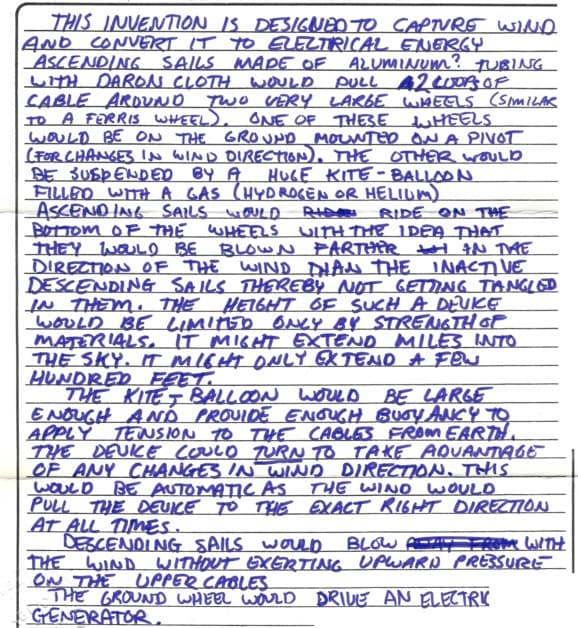
Doug Selsam has been designing the most advanced wind turbines in the world since 1979! See, documented below, “Auto-Oriented Wind Harnessing Buoyant Aerial Tramway” what has recently been called a “Laddermill” […] and which has been a granted a U.S. Patent 6072245 in 2000.
Hi Pierre: When I think of a “network”, which starts with the word “net”, I think of, for example, a fishing net. It’s basically a 2-dimensional structure covering an area with interconnected strings. Think of a broadcasting “network” - pretty much flat, within some minor deviations, following the ground. Or a landline phone network, using wires. Overall shape could be curved, like the little net on a handle used for picking up fish once caught. However, I’m not so sure two parallel loops of rope constitute a “net”.
Anyway, semantics - if we remember how the people running the old forum, especially my old “Low-and-Slow Magazine” hang-gliding hero, Joe F., decided any word could mean anything they wanted, to make whatever absurd point they wished to imply at that moment, destroying even the basic concept of language, there is no limit to what concept can be called any name anyone decides to call it, but to me, a “network” resembles a “net”.
And an “advanced” “network” might reasonably be expected to:
function at all;
function better than a “regular” or “not advanced” network.
in addition, it might be expected to possess definable or citable characteristic(s) rationalizing its description of “advanced”, distinguishing it from more “mundane”, “standard” “basic” or “primitive” networks.
So far, I’ve seen no actual functionality demonstrated or even fully described on paper, no previous “basic” kite network, none of it. We haven’t even seen the “advanced” network demonstrated as able to remain airborne, let alone generate electricty!
See the Figure 2 representing two Smith-kite lattices with respectively eight and ten kites.
From the Abstract:
Smith {\it et al} discovered an aperiodic monotile of 13-sided shape in 2023. It is called the `Smith hat’ and consists of 8 kites. We deal with the statistical physics of the lattice of the kites, which we call the ‘Smith-kite lattice’. We studied the Ising model on the aperiodic Smith-kite lattice and the dual Smith-kite lattice using Monte Carlo simulations. […]
Oh @PierreB NO please NO
That is a huge resource for jingoistic, half related distraction and mission creep right there.
I had a hope when it said “Hat” that it might be a lattice more like



 Yutaka Okabe
Yutaka Okabe
