This topic was automatically opened after 11 hours.
A post was merged into an existing topic: Questions and complaints about moderation.
This collection of drawings is a helpful insight into how @kitefreak sees Kite Networks.
https://drive.google.com/open?id=0B0qQxFlXu7t-cG1iOTNaVUM4Nm8
1 Like
No. Those drawings are from almost ten years ago. I have published many better drawings and concepts since. Luke claims this topic was damaged and should expire soon. Now I agree, since that Google Drive stuff is what the topic has devolved to.
Whose Google Drive folder is that?
1 Like
Seems to be @Rodread’s. Are [edit: ok with] your stuff being hosted there?
No, my stuff has been archived by Drachen Foundation since 2009, and also Energy Kite Systems (JoeF). Rod seems to have made sample copies, given the 1000+ other drawings available, most more recent.
For reference, a paper related to reverse-pumping is found here: Lozano, R., Dumon, J., & Hably, A. (2013). Reverse pumping: Theory and experimental validation on a multi-kites system. 2013 17th International Conference on System Theory, Control and Computing (ICSTCC). doi:10.1109/icstcc.2013.6688978
Three line constant flight is pretty neat…
Deleted Posts above. Did not notice this was a Moderation Lounge move, as protested by deletion.
Kite Networks (scalable designs) is a main topic. So it deserves to be in System Design.
Beside or within Kite Network concept, Dave Santos introduced the concept of aerotecture regarding Mothra in the present forum.
Aerotecture ™ is also a trade name for a wind turbine.
Aerotecture is mentioned on the publication below, The Return of the Rigid Airship:
Aerotecture would be an (habitable?) airborne architecture. Now what could be the difference between aerotecture and kite network? Or would aerotectures be included within kite networks, or even be unities within a kite network?
The difference I see: a kite network can be kites connected by ropes such like a train of kites, as an example of similar unities that are connected. But a kite network can also be a modular construction such like Mothra. From this the “aerotecture” term could define a construction with several elements forming a whole, said elements being or not modular elements. Mothra could be an “aerotecture”, but also the same for a kytoon as it contains several (not modular) elements.
Basically, we explore different ways of scaling.
With arch kites being common, for example, paragliders, my take on “Mothra” was that it was a sort of single kite, with very short tethers at the ends, so it flew close to the ground. From my viewpoint, the only aspect suggesting a kite “network” was that the panels were not sewn together along their seams, but only attached at the corners, leaving spaces for the air to travel through, lowering the aerodynamic efficiency and advantages of a “high-aspect-ratio” wing. Instead we saw a long, “leaky” wing. Seems like it was just too much trouble to bother with a complete construction, so it was just left “as-is” after attaching the corners of the tarps.
If you can imagine a WWII B-29 limping home with a wing full of holes, as we see in youtube documentaries, it may still barely fly, but it flies better without the holes!
It seems to make sense, but let’s try to see further if there is not a possibility for a fractal wing whose elements would be well-sized wings, all of which could form a gigantic wing that would not be possible to achieve in one piece.
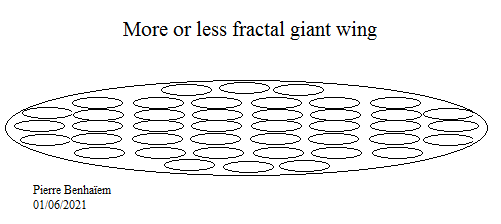
An idea for fractal Mothra is sketched on:
To be honest, I don’t know if it can really work. What do you think about it?
Migratory birds tend to form a V quite close to a delta wing, as for the photo on the link below:
In general I believe flying in a wake is difficult. It would be difficult to transfer flying in patterns from birds to AWE. The birds are precision machines, an AWE rig can not be built with that fidelity and still be cost effective, I believe.
And also multiple tether control is not easy. In addition migratory birds fly in formation in order to protect themselves against apparent wind, as for a cyclist peloton in a race. But kites should not protect themselves against the (real or apparent) wind, quite the contrary.
Thanks Dave. I did all the drawings, in all my patents, myself, using AutoCAD. I’ve never hired an artist. An enthusiastic volunteer provided some great 3-D renderings on my website. Meanwhile, never underestimate the human brain for instant simulations that pan out well in real life as realistic, assuming the person knows his subject matter.
Transversely to these different topologies we can distinguish three families of kite networks, with examples:
-
Lifting kite networks
Ed Sapir:
Windswept and Interesting:
Network kite power media primer 3.pdf (1.4 MB) -
Power aligned kite networks
Train of parachutes in yoyo mode from Zhonglu High Altitude Wind Power System Trial on Site (realized)
A variant for study:
-
Power crosswind kite networks
Advanced Kite Networks - #2 by kitefreak
KiteGen
OrthoKiteBunch
Rotary devices like stacked Daisy

Lifting kite networks seem to be achievable devices. It remains to be seen what the strategies are to avoid entanglements. I had proposed using Sharp rotors as separators, but options proposed by windswept and interesting can be better. See also the photo above of the kite network by Ed Sapir.
Power crosswind kite networks, version rotary devices, has been realized.
On the other hand, the other versions seem to be more difficult to realize, while having a great potential: it is necessary to be able to control the crosswind trajectories while preserving space between the units.
When we think of a kite network, and we see some renderings, we first think of a structure similar to that of fishing nets or network lattices where lifter kites are settled in the nodes, here the whole network holding the power rotary stacked rotors which are also kite networks by themselves, the whole also constituting one of the most conceptually accomplished kite networks.
To get an idea:
We could consider that certain structures close to kite networks are rather kite clusters or Kite bunch because each (power) kite has its own freedom, the old OrthoKiteBunch being something intermediate with a “kite network” component due to the node aloft which connects the base of the kite units which have a high risk of entanglement and are difficult or not possible to control.
Does it count as a kite network ?
In my opinion, we see a network of five networks. The global network has a common intersection with the five secondary networks whose each has a common intersection with all the lines which compose it.
An attempt to see what would rather fall under the network, or rather the bunch:

A review of some experiments of kite groups (perhaps kite networks) are related below.
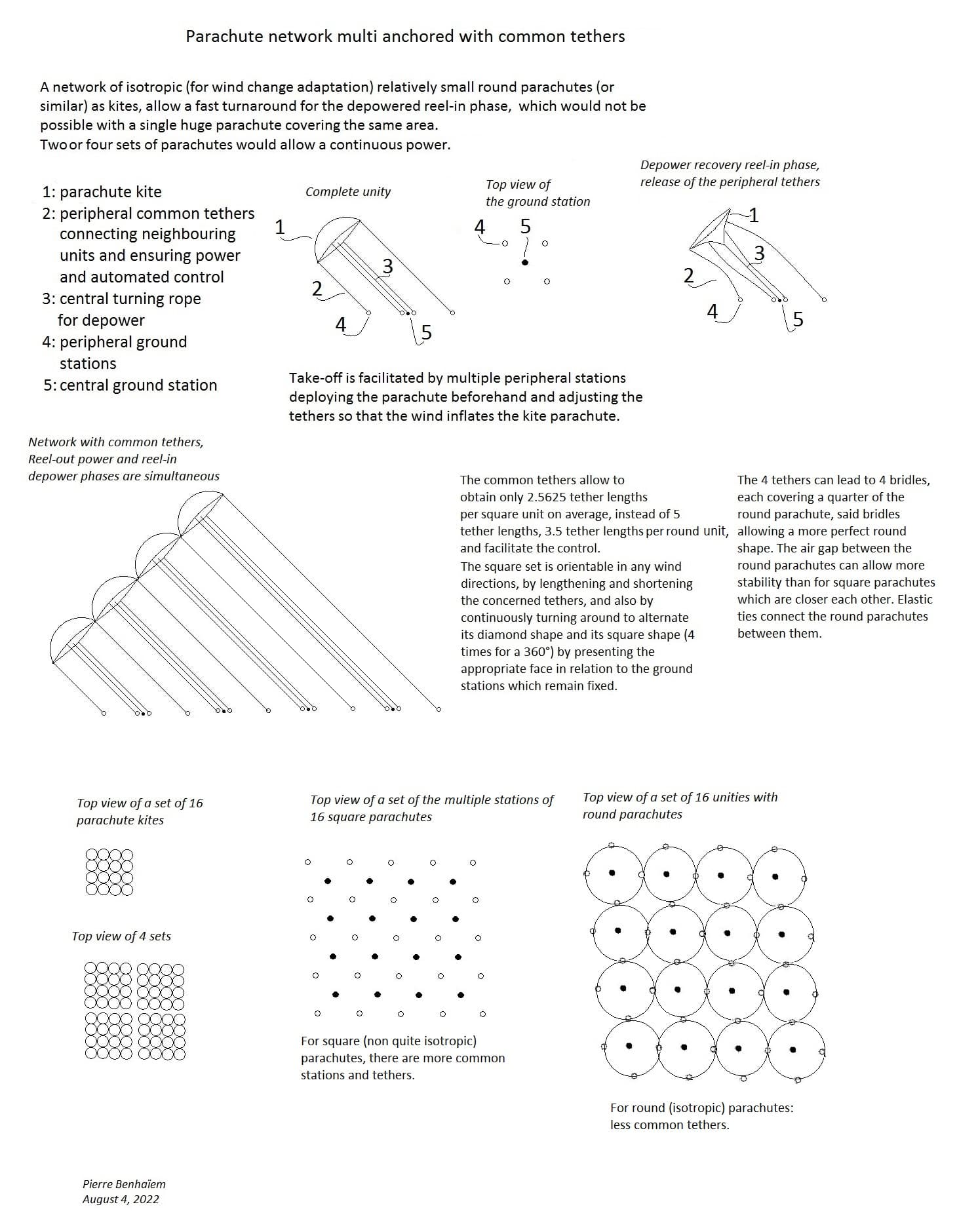
Tied parachute kites (on the sketch, the photo representing a working kite network) where the canopies are tied, so not free, like on the photo. The group did not fly for more than a second. The four parachutes opened and inflated at the same time for only a fraction of a second then deflated due to the interaction of kite traction and expansion force.
Parachute kite cluster with original ballasts (bears), or without, where the respective canopies are free, and the knot settled at the base of the respective suspension lines. Both flew in an anarchic manner without climbing, while an unity with the bear flies perfectly like a kite.
Kite chaos where each kite had its own tether after the suspension lines, the respective tethers joining much lower towards the common main tether, in such a way that the freedom of each kite was increased compared to that of the parachute kite cluster. The set flew maintaining itself at a certain height and descending from time to time, while only one of these kites (without bear) only flew for a few seconds.
One of the observations is that a kite in a group must have a certain degree of freedom. The kites should not be connected to each other by their respective areas, unless we are dealing with rotating sets like this.