This should be interesting. An original early AWE design. Is it a viable option?
This should be interesting. An original early AWE design. Is it a viable option?
This is my initial take on this.
Positive aspects:
Issues:
The thing I dont like about the design is that the wings are lifting mostly upwards, normal to the direction of the wind. Crosswind generation is probably necessary, but crosswind power is generated either downwind through the tether, or flygen in the opposite direction of flight.
As it stands, the laddermill incurs a giant cosine loss for power generation. So one will be inclined to let the laddermill travel not upwards but rather downwind. This limits again the max altitude.
The compensation for this would be to «oversize» the kites in order to match tether diameter/strength to the actual pull of the kites. This is maybe ok, but there will be an additional material and handlig cost associated with this. Also, an additional strain on depower is placed on the kite, as you want maximum depower, but now the wing area is larger.
Perhaps a laddermill with a 30 deg elevation angle sounds better for me. I guess in that case we are looking at something closer to Doug Selsam’s Sky Serpent…
And that increases the downwind speed, destroying the “crosswind” component of flight.
I was thinking the wings, if the tether was leaning downwind, would have to loop locally. I believe this was mentioned in the paper. As such it would perhaps be feasible. The wings closer to ground could pull upwards, while the top wings pull more downwind. Such a bent Laddermill might use less real estate ground level.
I thought about wings vs efficiency of the rig in general terms: If your tether is downwind and the wing+tether has lift-to-drag ratio N:1, then for any force created by the wing 1/N % approximately is lost to drag. Now if the tether angle is 45° elevation, you need to pull up vertically also. To get the same force downwind AND upwards, your loss will be 1/cos(45°)/N ~ 1.4/N instead. At 75° elevation your loss is 3.8/N.
This is a crude approximation I know, and probably somewhat wrong, but I believe it hilights why producing straight upwards is not a good idea.
It is a testament to the helplessness of the current AWE wannabes that random opinions substitute for any actual knowledge from experience. After how many years: “Well I think…” Why not just officially declare a laddermill impossible to build? Gosh that would save a lot of work so we could take more group selfies with the extra time we have, from never even trying to build the most rudimentary laddermill. Hey grad-students and interns, how about a selfie in front of your working laddermill prototype? Here’s the logical progression for groundgen, as I saw it in the 1970’s:
Kite-reeling => laddermill => SuperTurbine
Think of the cars:
walking machine with legs => multiple legs rotating in a circle => wheeled vehicles
Start with the obvious, move on to “the obvious next step”.
@dougselsam please elucidate your understanding of how a laddermill will overcome it’s most obvious shortcomings.
High speed is an absolutely critical component in any kinetic energy harvesting system which needs to be lightweight and efficient. Laddermill doesn’t have high speed.
Simplicity - another killer for laddermill, it is woefully overdependent on control devices on each wing.
Yes, with fixed line lengths, kites can rocket upwind on launch. At launch, they’re travelling near vertically and crosswind. As they rise they start heading into wind increasing windspeed and tension. Then they quickly reach equilibrium and settle.
Even with rigid sails on control pods tilted back between 2 jelly-fishing lines… Laddermill has a serious lack of horizontal tether force to induce this rise… and now you want it to go downwind too. Yes fastest point of sailing is downwind. But it always requires heavy lifting upwind legs. Highest tension is upwind, but you can almost never tow another boat that way. Crosswind, it’s a handy term for a great place to play all day. Just use it.
It’s described much better by Moritz Diehl in AWES book 1 Chapter 1 Airborne Wind Energy: Basic Concepts and Physical Foundations
Wind and tension should combine to constantly eject kites from their current position like swearing from a stand-up comedians brain.
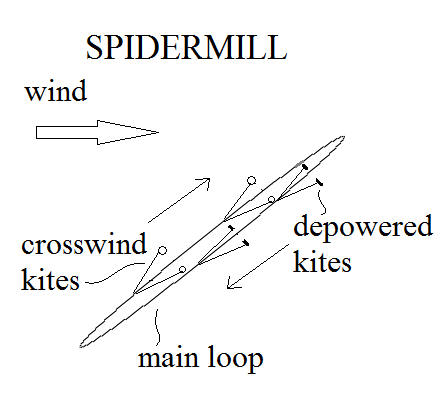
Indeed in something called as “Spidermill” pairs of crosswind kites are installed and produce power by flying by figure-eight or loop while they climb along the main tether. The implementation seems to be particularly difficult, due to the requirement of numerous and balanced forces. Here is a quick and not too good sketch
Let me chip in that the fact that every wing must be controlled should only be a nuisance, not a killer. The control system need not be very expensive, and failure for some wings should be tolerable in this case. It is also a good thing that the wings are all similar. I am actually more concerned about getting wings on and off the laddermill
Dont misunderstand - it still a huge challenge to control these in itself. But if the laddermill idea was otherwise sound, I believe this would be solvable
Thank you for that clarification, I have not seen that name (Spidermill) before. That being said when looking at your drawing I cant see how such a configuration is much better than 2x Kitemill (or Ampyx) rigs. I guess only for higher altitudes, and then only because you have twin kites, which Kitemill (or Ampyx) could also as well implement for the same advantage
I always thought that meant something like this, instead of a single or a dual kite at the end of the yo-yo tether:

http://www.energykitesystems.net/CoopIP/SpiderMillDynamics.html
That looks like a great concept to me.
The loop adds more complexity so that should be another step down the road, if it has added benefits.
Best sketch I’ve ever seen of it yet. Loop going opposite way to the previous laddermill? Upwind side going up… Cleaner wind.
The problem with Spidermill is that the crosswind kites generate forces which are not aligned with the main loop ascending.
I don’t see the problem? You can program the kites in a pair to always mirror the other kite across the main tether*. And even if you don’t do that, the tether will conform to the sum of the forces exerted by the kites. It doesn’t matter if the main tether has a somewhat zigzag shape, I think.
* or add a swivel at the attachment point of the pair of kites to the main tether and let the kites fly in circles, opposite each other.
If the secondary tethers are long enough, the kites can sweep larger by keeping a low angle with the main tether.
Indeed by putting my two eyes instead of only one, I see this concept can be promising. And the current companies have already some rigid or flexible crosswind kites.
If this concept can be implementable a high advantage could be a better maximization of the space use as almost all the space can be usefully swept. Adding higher altitudes as the 2 x kites are superimposed, and also a continuous power.
What is your intended power take off method with this long gang spidermill?
Does the line pulse up and down like yo-yo? do-able with a lot of coordination
Or loop round like laddermill? how do you take corners?
or sweep along or round a track? orthokitebunch
Takeoff and landing is probably a forte for spidermills as a lifter kite could simply start the mill by lifting wings one by one, then return to base alobg the tether.
I think a problem would be the poor utilization of the wings. Half the time they are depowered doing nothing. So I hereby announce today’s fantastic idea:
Let the spider pairs be mobile along the tether, so they may run faster downwards than upwards. I still dont like Spidermills much, but that might improve matters
TU Delft dropped Laddermill, probably because it was too difficult or could never be made to work (at least in an academic time frame), and YOYO is simple. I believe the highest power generated from a laddermill is Doug Selsam’s Skyserpent/Superturbine (multi kW). Rod Read and Christof Beaupoil follow along similar lines with softer versions.
All 3 share the same principle, multiple HAWTs (Horizontal Axis Wind Turbines) on a ladder. Directly connecting kites together, to leverage the best wind turbine design to date, seems like a good idea.
Take a look at a HAWT wind farm (especially an aerial view), columns and columns of wind turbines spaced out as efficiently as possible. One column is similar to a flat laddermill. Of course, a flat laddermill can not take advantage of stronger and more consistent winds at altitude, but the HAWT windfarm has zero elevation and no cosine losses.
The HAWT windfarm can be scaled to any size, just add more units to each column (tail). Can the laddermill be scaled? If the ladder is made longer, azimuth/elevation snaking increases (see Doug’s Skyserpent 2008 video). Landspace used will increase in order to maintain separation from the adjacent ladder. Any change in the wind field (direction or shear) will induce snaking, and result in an unsteady power output. The elevation angle can not be increased beyond about 30 to 40 degrees due to cosine losses, and power loss.
Is the laddermill a good idea …