An example of a land use management is below (from Power to space use ratio),
Figure 4, from V. Salma, F. Friedl, R. Schmehl: “Improving Reliability and Safety of Airborne Wind Energy Systems”. Wind Energy, in production, 2019. doi:10.1002/we.2433 . Preprint accessible as pdf :
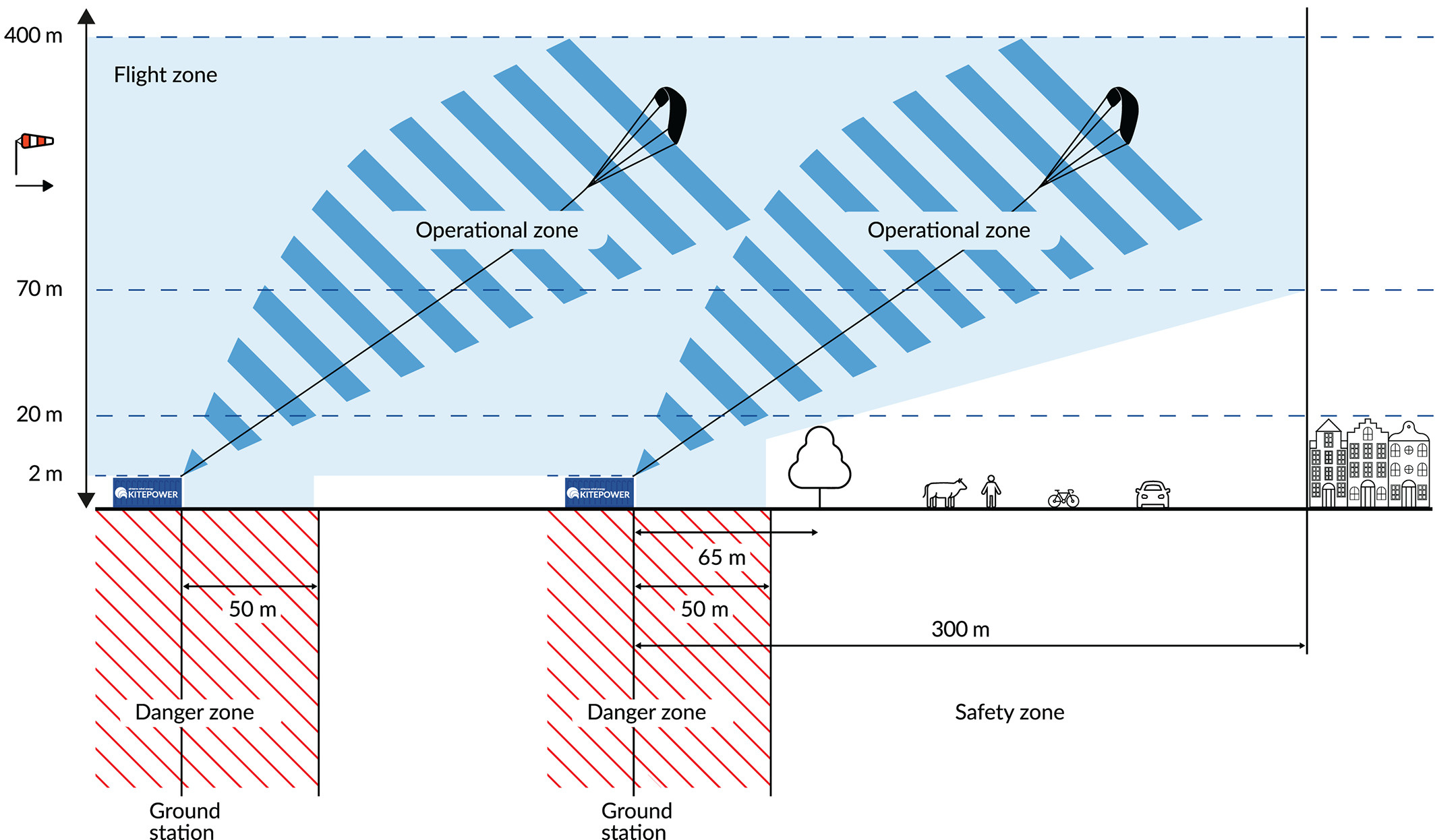
IMHO the Danger zone should cover all the ground zone as a minimum, likely more. The kites should be spaced more, by at least a tether length, in order to mitigate unforeseen events such as wind shears.
Then some strategies allowing to maximize more the space occupied should be studied in order to increase the frontal airspace swept by the kite(s), such like Low radius loop or Vertical trajectory for yo-yo AWES? to stay in neighboring architectures. Other architectures like @Rodread’s Daisy network seem to have the potential to respond favorably to this major security and credibility issue and which is quantifiable by the Power to space use ratio.