brought me to a thought about launching soft kites.
You could use an unfolding/folding techniques like Kitesails does. In strong winds you could launch similar to kitesurfers orthogonal to the wind. For light winds you could go launch downwind parallel to the wind. And for even lighter wind you could additionally reel-in.
A rail sounds like quite a bit of infrastructure, which could also take up land from other uses… A portable launching crane may work instead at your launch site… Assuming you have a real need for your launch and ground site to be separate.
Might be possible, but is even more compicated than skysails’ (I assume you meant them) system, which might have had some issues. (We don’t know for sure, but the original company did go under)
The kite was docked using a separate line just to get the valve in the right position, I think.
Maybe this would be the case here, too. The valve is at the back and there’s always a line going from there to the docking station.
If one has the packing station at a large enough distance I don’t think it’s neccessary to adjust the angle to the wind exactly. The winch can pull the kite up. Landing will probably be much more difficult.
The future is said to be rigid. Would make automation much easier. Just do it like zipline and let the kite hang there (or lower it into a container). To launch just tighten the winch line and release the hook. (The hook would have to be designed to allow for only two degrees of freedom, so that the plite doesn’t launch into the ground) Might even be possible for unpowered drones.
With a winch and some means to brake the kite on overpower I would think you should be able to launch in many windspeeds directly downwind. I think it would not be often you have to launch in really high winds, and very often you launch in the lowest flyable wind. You could perhaps get away with not being able to launch in the higher windspeeds altogether
For me the «dealbreaker» is most probably the amount of line that must be reeled out before launch. For the kite to be ensured into clean wind, the tether must have the altitude length plus whatever you reel in in the launching process.
The good thing is if you dont find said clean wind, you can just reel the kite safely back to the winch.
Yes and no. Though you would need a means to transport the kite back after an emergency landing, you might still save the equipment, so this might be an ok design choice.
By having a distance (larger that pictured) between winch and drone capture point one can do a glider winch launch. No propulsion system on the kite neccessary at all.
I was reminded of Drone assisted launching of a Lift Kite by an article on drone checklist planning.
In this case the drones are pulling lines to assist in cable pulling.
One of the largest U.S. electric and gas utilities recognizes cost and time savings to be just a few of the key benefits of using drones for tasks such as power line repair following severe wind events. During post-Hurricane Maria restoration work, Southern Company pulled 72,000 ft of rope for conductor wire using drones — a project that previously would have taken six to eight months was completed in just eight weeks.
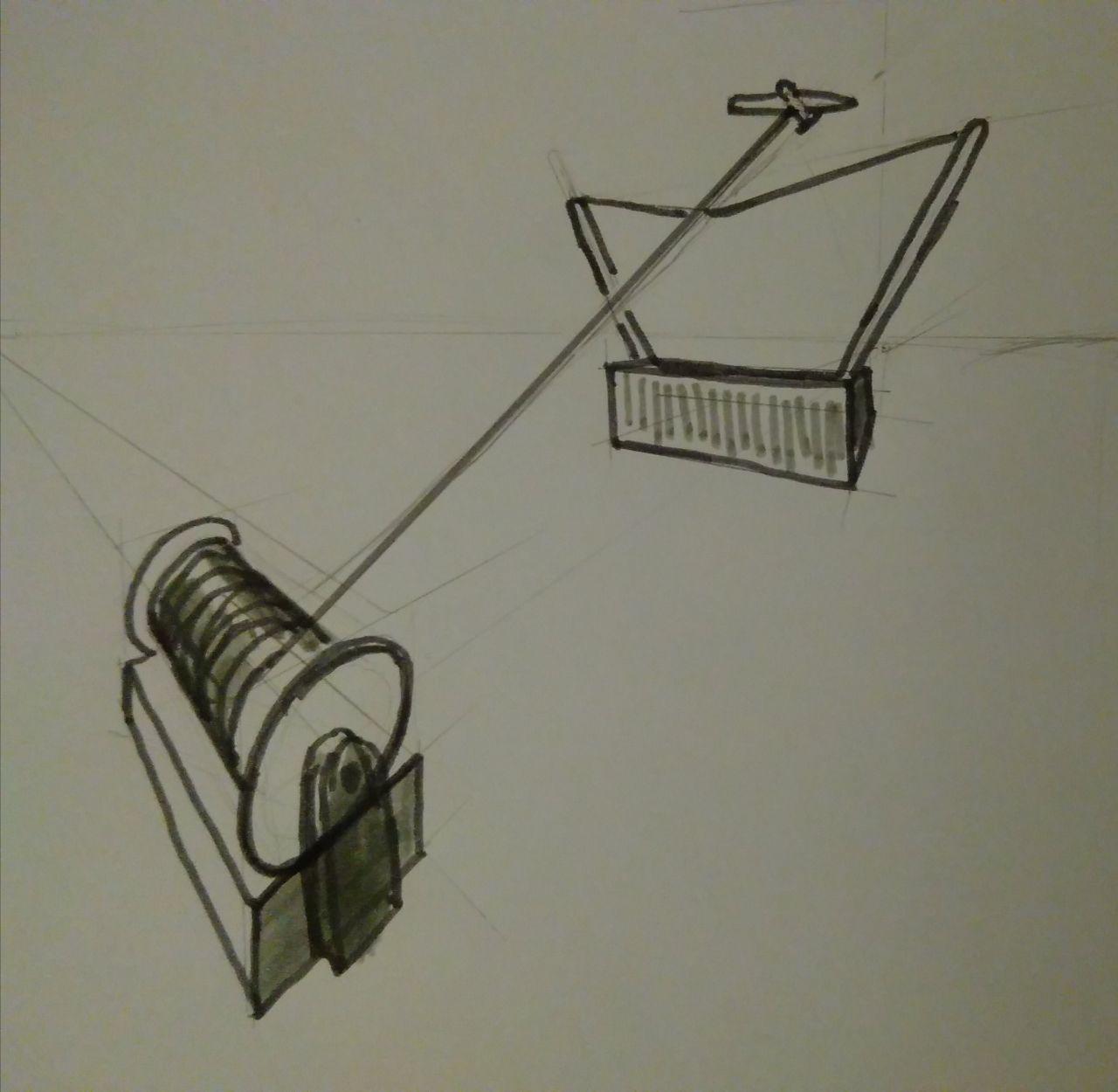
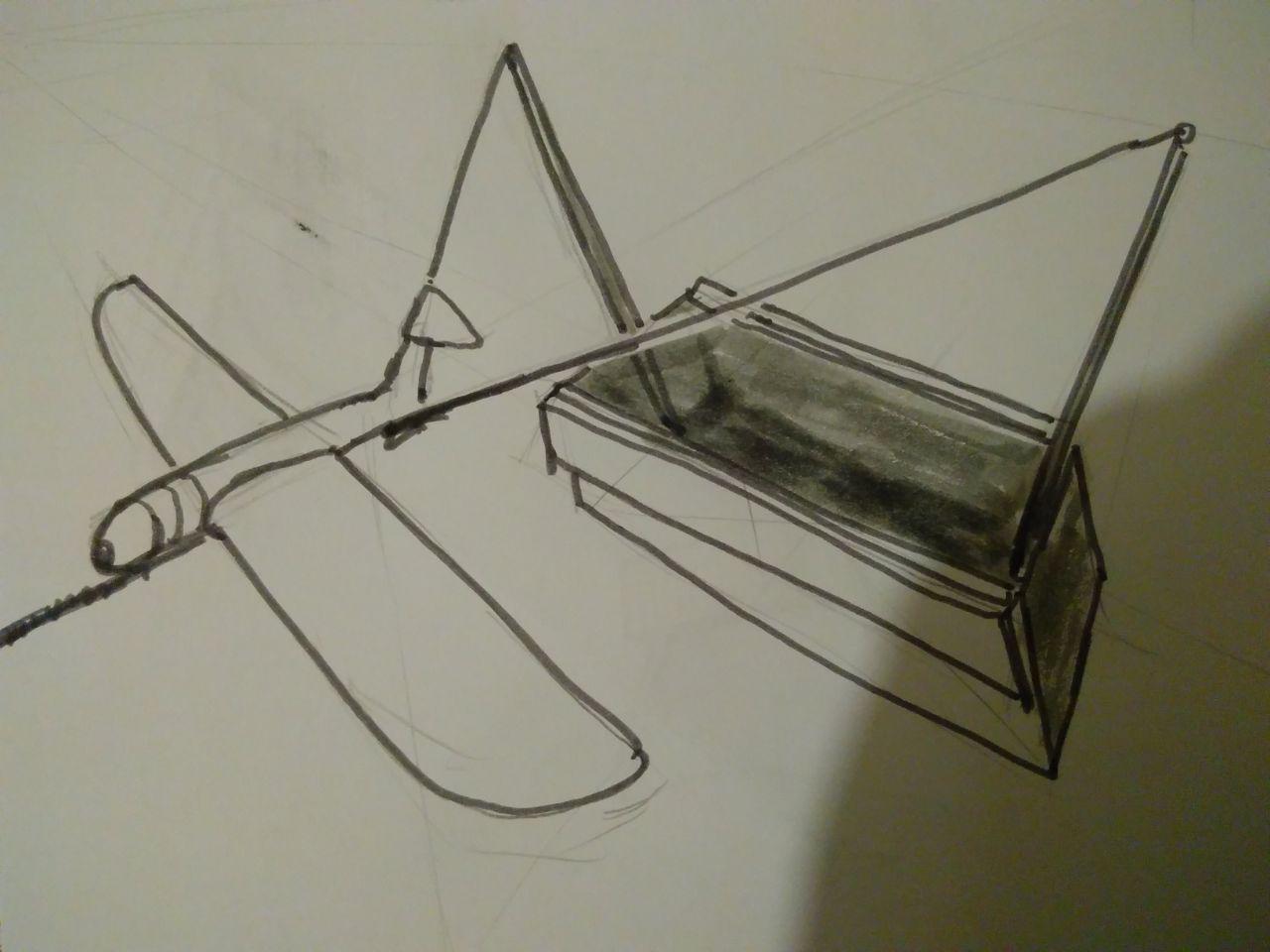
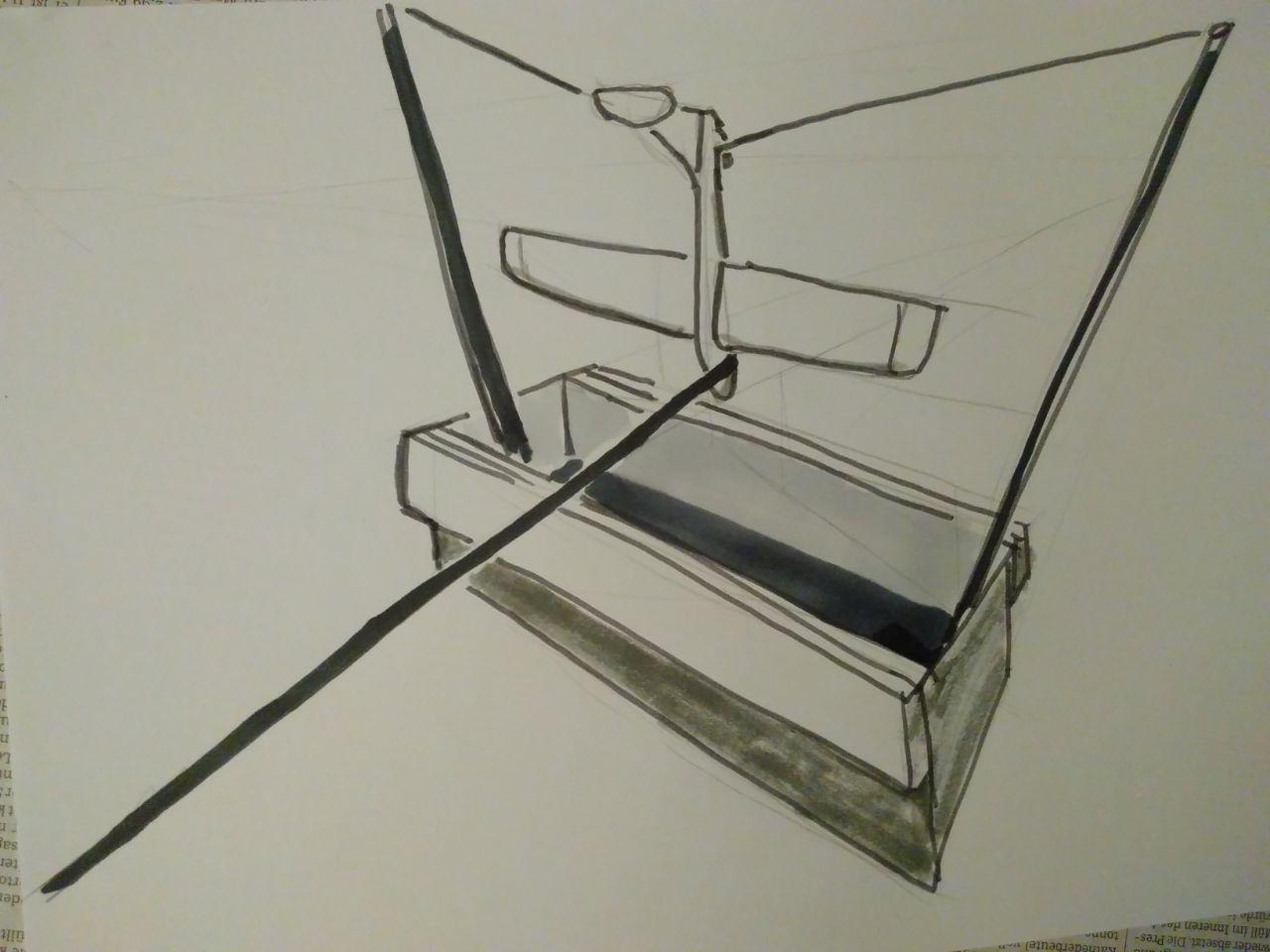
A few years back I did some very cheap experiments with deploying a lift kite from a lifted bag.
A pre lifted kite in a bag can help to launch above calm ground air.
The idea was
Simulating having a drone lift a lightweight kite up to altitude in a sock. When the drone is high enough (and downwind) the kite tether tension is used to pull the bridles and kite out of the sock… This is akin to a fairly standard throw deployment for a ram air or single skin kite or parachute.
The obvious issue with this scheme is that the kite and drone separate so maybe you need a recovery drone manoeuvre, you also need to repack the kite to a launch sock on the ground to restart.
@floba Florian from KiteKraft had a scheme proposed at AWEC2017 (I think it was ; maybe it was 2015)
whereby the drone lifting device would be affixed to the tether near the bridle point. The lfit kite would be inverted fro the lift up to higher air. The advantage of the scheme was that the kite and drone stayed together and didn’t need reconnection (Sorry Florian I never really took to that idea. To me, the launch dynamic looked awkward)
After you have developed the mechanism to launch and recover your kite …
You need to be sure it works.
And your launcher / recovery system may well have 3x 9’s reliability of it’s own accord. But can you trust it?
Reliability of systems can always be improved with an extra layer of checking, - your control pod sensors are doing what they say they are.
An add on Kite flight visual recognition system doesn’t need to be complex or hard to implement.
Here’s a ready made, cheap to install version exploiting prior machine learning using TensorFlow.js and NodeRed
It may not be the fastest way to work and it relies on web connection…
But Look it’s found 3 x kites in the sky
Time to send the double happy kite flying signal to our controller
4.2 Piggy-back docking
A second evolution of a docking system was devised with the necessity to launch a ram-air
inflated kite in mind. In order to keep the kite inflated, it could only be fixed to either the
upper or the lower surface. No pressure was allowed which would squeeze out the air. It was
decided to piggy-back the kite on top of the aerostat. This meant fixing the kite at the lower
surface. For this purpose, a number of plastic rings were attached to the lower surface of the
kite. These rings have a very low mass and had no noticeable effect on the flight performance
of the kite. Figure 7 shows the principle of the piggy-back docking system.
The reluctance to use kite balloons is noticeable. Page 7:
A second option was the use of something called a kite balloon. Kite balloons are built by a
UK company called Allsop Helikites ltd. It is a combination of a small helium balloon and a
delta kite. Its lift is a combination of helium buoyancy and aerodynamic lift of the wing
surface of the kite. Its directional stability is far better than that of a conventional helium
balloon. But in a zero or low wind situation, the aerodynamic lift is extremely low, leaving the
helium balloon as the primary lifting device. In this case, the kite balloon would have to be of significant size to generate enough lift to lift the kite. Which means that once the helikite ascends to an altitude where there is wind, the lift will suddenly dramatically increase. This will put unnecessary strain on the
line and the anchor. Furthermore, the helikite of sufficient size is a rather expensive solution (around 7000 euro) and it would not be possible to deliver the helium kite on time for testing.
This meant the helikite was disqualified as a lifting device.
Two different variable lift aerostats, the Skydoc and Helikite were considered. Both are shown in Figure 5. The smaller aerostat on top is the Skydoc aerostat. It is an oblate (flattened) spheroid and its mesh flying harness gives it a pitched orientation which allows its hull to generate lift in a wind field.The lower aerostat is the Helikite and it is a combination of a spheroid aerostat and a kite. It generates lift using its delta wing. The attraction of such aerostats is their ability to maintain a more vertical orientation in high winds. For a conventional aerostat, only the drag increases as the wind speed increases and, as a result, the aerostat loses altitude as the angle of the aerostat tether becomes less and less vertical. To evaluate the performance of t he two variable-lift aerostats, experimental tests were performed while towing the aerostats behind a boat. During the tests, poor performance of both aerostats was observed. At high speeds between 40 and 50 km/hr, the aerostats became unstable,and sometimes dove violently all the way to the water surface. Based on these observations it was decided to exclude the variable-lift aerostats from further analysis and instead focus on more conventional spherical and streamlined types.
This leads me to reconsider what I have been able to investigate from kytoons or perhaps kite-blimps about other concerns than launching.
")


