Commercialize it!! 
1 Like
Yeah, I think it can be turned into a wide range of products. I’m keen to partner up to get this done. However, It’s going to be very hard to organise making a product as a house husband & part time teacher on the Isle of Lewis
2 Likes
Teach the kids how to make a product.
1 Like
I don’t think these arguments are good enough to justify further AWES development.
The large vibrator aka. Vortex Bladeless Wind Power justify their continued development with less environmental impact. But they are so inefficient due to minimal swept area, that it’s laughable.
Things I can think of:
- Mobility
- Faster scaling of wind power since no construction is needed (climate change emergency)
https://twitter.com/awesystems/status/1156470724577701888 - Sailing I’m a huge fan of ship traction awes. The only competition is from traditional or rigid sails
- Higher capacity factor
Crikey @Tom … I thought you were saying there weren’t good enough arguments in favour of justifying further AWES development.
Just in case anyone is looking for reasons … here’s my initial 36 taken from recent presentation file
1.Fail Safety & network part redundancy
2.Minimal Cost prototypes £5k/1.5kW
3.Stability & control from simple networks
4.Fail-soft functionality degradation
5.Stacking => multi kite ring contribution
6.Packing => ground area/kW minimised
7.Power to weight >0.7kW/kg
8.Most Scalable AWES by modular unit network addition
9.Flying tuned for deep in power zone ~=20 -30 deg
10.Line efficiency / kite area also fairing + another trick
11.Separated lift and drive launching & land
12.Yaw & Elevation whole stack stall from lifter or back
13.Modular swap & reconfiguration
14.Solidity reconfigurable by radial expansion, number on ring & concentric OM
15.Lattice and stacked lift cumulation hosting options
16.Smaller wings crash better with less Ek & frangible net
17.Structure power and transmission from wind
18.Fewer energy conversions - direct to rotary groundgen
19.No rope abrasion with graded material transitions
20.Consistent L/D governing generation capacity as TTR
21.TRPT - lower line speed lower down = safe & efficient
22.Portability (Scouts camps have demonstrated)
23.Predicted ~=0.17g CO2/kWh
24.Not rigidity dependant.
25.Low wing loading on smaller arrayed tensile rigid wings
26.Open source design framework on components <1kW
27.Generation starts from low & builds with altitude
28.Ring expansion control by bank angle
29.Reverse drivable @ bottom of stack & prop assist viable
30.Performance predicted to improve with scale
31.Suitable for High Cl wing arrays
32.Multiple power tap options position & type
33.Marine analogous versions seem viable
34.Easy diagnosis, repairs & CAA EASA FAA approvals
35.Easier to build smaller simpler wings in smaller facilities
36.Pretty Colours
and of course the crippling disadvantages… not
•Multi part complexity (but same parts modularly applied means easy maintenance + no abrasion = low fail rate)
•Multi line drag and snag (but more kite per line is more efficient and fairing! Nets don’t tangle like single lines.)
•It can over-twist (Only if overloaded & You can unwind from below. + powered rotation from below can lift)
•TRPT Elasticity is hard to model for control (Works without control so far. Test data is easy to gather, dyneema is very fast 30M@break >100GPa)
•Needs a big lifter (No, not really, and lift kites stack too. Can also be fractal lift shared, valley slung and lattice held)
•Less studied (Basically, it’s a mechanical drag mode AWES, which is ace! PLEASE STUDY THIS! )
I was referring to the arguments brought forth by @tallakt, assuming lowering LCOE isn’t possible.
Skimming through your arguments, most are “internal”. Arguments why daisy is a good awes design. And this is totally on topic for this thread. Tallakt and I were going a bit offtopic however, considering what advantages awes has from an outside perspective (investors, policy makers, etc.)
For example: “23.Predicted ~=0.17g CO2/kWh” is relevant from the outside,
“25.Low wing loading on smaller arrayed tensile rigid wings” isn’t.
1 Like
#36 is the one almost everyone comments on first.
“oh it’s pretty, I like the colours”
I must purge all old videos of the ram air rainbow colour kites from the internet.
I think the portability is intersting now everyone in the world will be a refugee and we’ll all be living on top of burning peat moors which you’re not allowed to disturb with a wind turbine foundation … an anchor will be fine though. #37 deploy-able at sea
Just spray the rigid wings?
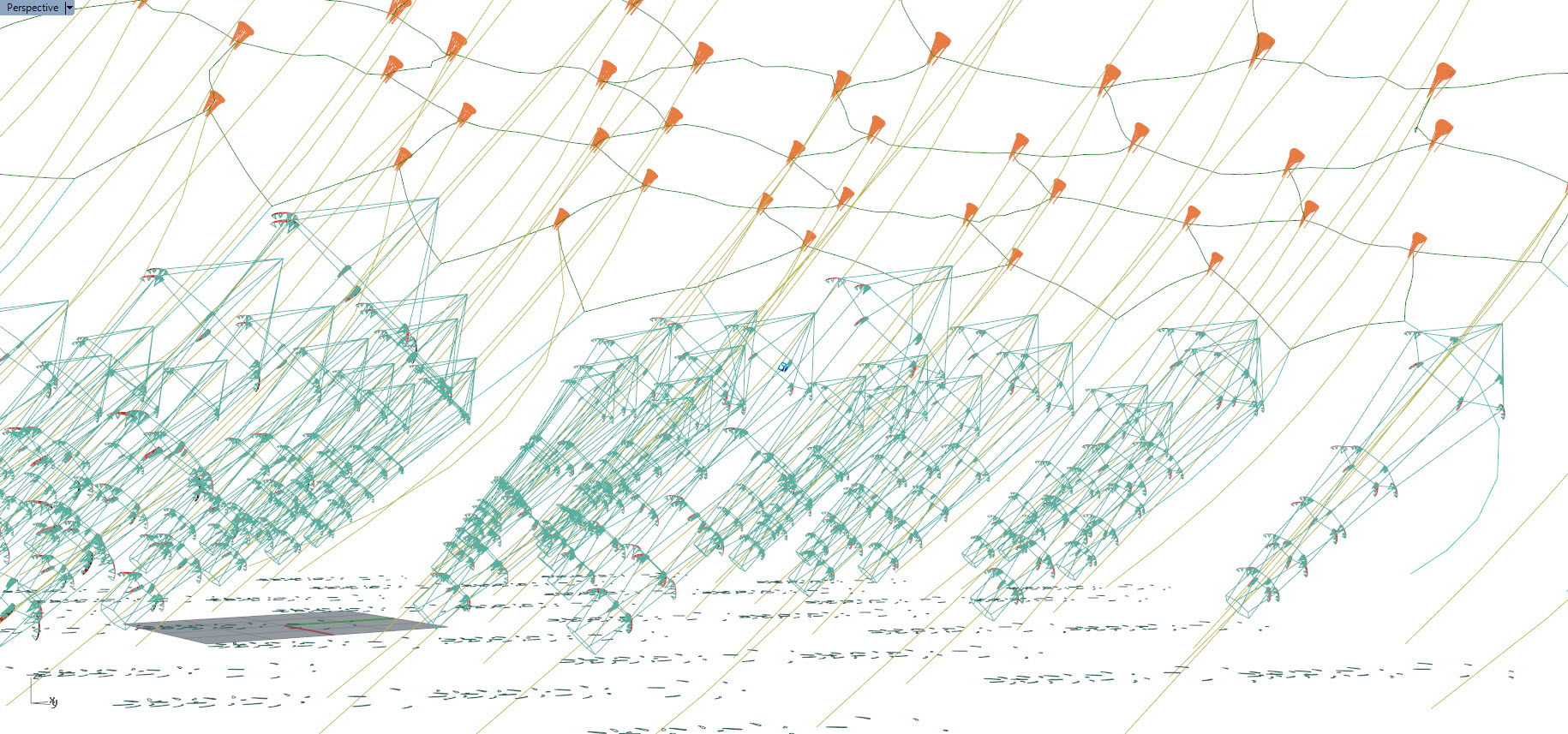
@Ollie has updated his Tensile Rotary Power Transmission model
It works a lot faster than any of mine.
He says…
Finally managed to get material damping in there.
Axial force applied from start, after 2 seconds torque applied at the top, after another 2 seconds torque applied at the bottom. This is what happens if you slam the breaking current on.
Next step, add in aerodynamic damping…
And he sees a lot of scope to further improve the model.
1 Like
That’s “braking” current…
1 Like
 Dunno @dougselsam… Sometimes when I slam it on… It really is breaking current.
Dunno @dougselsam… Sometimes when I slam it on… It really is breaking current.
@Rodread, please could you enumerate the main elements of the network Daisy kites?
I see the stacked kite rings and the kite lifter, that for an unity.
I guess the network concerns the top of unities and contains the kite lifters. But I am not sure of it.
Perhaps the stacked kite rings are parts of the network, although the concept of connecting unities (= several stacked kite rings) is different of a stacked kite rings (= an unity).
A preliminary analysis could allow to begin to see if the network concept is workable as a full organization of Daisy kites, that in regard to various winds.
I’m really not sure what you mean here @PierreB
There is a huge amount of enumeration, evaluation, computation, a huge range of configuration parameters and a huge range of potential operations. Is it quantitative test data? Qualitative analysis?
From my last simulation analysis mixed with @Ollie’s power scaling mixed with looking at test handling…
I reckon with good generator control, the current kite rig style, PTO sizing and TRPT dimensions (might change the TRPT ring configuration slightly) could handle a 3x3 (tall x number on ring) kite stack up to 10kW, with the same lifter.
A fair comment on the Daisy architecture is that there is no MW scheme proposed.
OK. It hasn’t been “enumerated.” It has been alluded to and hinted toward. Scalable architecture methods have been demonstrated in simulation and physical prototyping. Also methods by which a single turbine configuration (as a net of x many kites in rotary net configuration) may be combined in steady field packing beside similar turbines… With ever taller nets able to work near the centre of such an array.
The limits of transmission of torque on a TRPT is probably what you want to know. And I’ve simulated how that can be done with soft kite turbines using no rigid structure… So… Still looking
This is a very very rough guestimate of potentially what a 1MW single turbine daisy system may be like.
Rated Power 1000 kW
Blade length to rotor radius ratio 0.3 "Current rotor 0.45
Rated Wind Speeds 11 m/s
Power Coefficient 0.2 “Current rotor about 0.1
I reakon diffiuclt to get much above 0.2”
Tip Speed Ratio 7 “Current rotor between 3-4
With a better rotor we should be able to get this up to 6-7”
Air Density 1.225 kg/m3
Lift Coefficient (lift kite) 1
Drag Coefficient (lift kite) 0.2
Tension to Torque Ratio 6 This will depend on the TRPT design
Number of kite ring layers 12 added by roddy
Required Total Rotor Area 6133.2 m2
Rotor area per kite ring 511.1 m2 added by roddy
Rotor Radius 17.9 m
Blade length 5.4 m
Rated Rotor Speed 4.3 rad/s 41.16895347
Axial Induction 0.055
Thrust Coefficient 0.21
Rotor Thrust 94500 N
Lift kite lift required 1297223 N
Elevation Angle 0.6 rad 35
Static Lift Kite Size equivalent 23736.5 m2
Rated Torque 231953.8 Nm
Required Line Tension 1391723 N
Notice static lift kite equivalent size here is huge… and kinda wrong in the calc …it’s not displaying the potential of x wind kites nor the potential of controlled lift on driving kites.
There would be a huge lot of remixing of capabilities and re optimising of parameters before we got anywhere near this scale… Dream on if you like.
There a fanciful prediction for a MW scale Daisy exists
1 Like
@Rodread Indeed I should clarify what I said in my previous comment.
For what I understand (thank to correct me if I am wrong) I see two elements of the Daisy network kite rotors:
-
the stacked kite rings (with kite connections, with connections of stacked kite rings) as an unity:
-
the connections of the stacked rings (by alveoli containing the lifters like a honeycomb?) leading to the whole network.

The question can be how 1 then 2 can be realized in regard to various winds in height (1), then in the zone of the whole network (1 and 2).
On “First Year Review” @Ollie indicates in the conclusion: “The aim of this research is to improve the operation of the Daisy Kite and assess how scalable the concept is.”
Is there an updated version?
Yeah,
the update was called 2nd year review I believe.
alveoli?
OK, there are many more than 2 parts.
As for how the whole works together. Generally, the part moving round fastest is not going to slow any of the other parts from going round. The part sweeping the most area is making shed loads of power.
Higher parts will drive more, more often. Driven parts will likely assist in inflation more. Networks help with this stuff.
Please can you indicate the main parts with a rough sketch?
I just found a sketch (see the attachment below) on a complete Daisy network kite rotors on Multi-kite airborne wind energy systems (MAWES) - #19 by Rodread.
How can this hold with different winds in the same zone, with a computerized control, without?
The “23736.5 m²” value can concern the required area for the lift of the whole system in regard to the transferable torque, comprising the lift induced by the kite rings, the static lift kite supplying the complement.
I remember the calculations for the rotating reel system mentioning the required lift for a given transferable torque.
1 Like
The photographs show a stacked kite ring but not the whole network. The videos show the whole network but the elements are not separate enough to allow a clear understanding.
Well, Good. I’m not going to give all my secrets away then.
Bloody hoped it would be understandable by now @PierreB
I have been sharing this idea with you for years.
Bloody loads has been shared on this subject and is out there.
It’s not as simple as saying magical topological analysis along the lines of

There’s like some stick, some tape, some string and a wheel, and a foamy bit.
That will work if you tie it all together and has done.
Yes complexity can evolve from simple networking of simple parts.
BTW… I am enjoying that paper despite the incredible complexity of terms
( Brain the size of a small planet) (eh… not me)