As for windspeed: Sensor didn’t make it on time. Wind data will be included starting next time. Forecast said 3m/s on ground level. Rotor should do 350W @ 10m/s.
Congratulations, beautiful concept and video. This could be suitable for offshore or onshore implementations with roughly the same height as current wind turbines but with far less weight et costs thanks to using light material and avoiding lever effect as the turbine is tilted.
Would be really interested to know the difference in torque you need to stall the rotor.
As compared to how much torque it was outputting when running.
There doesn’t look to be a lot of tension in the OTS in the test…Possibly why it was so bouncy along the axis. As per @Ollie’s work… line tension is a crucial parameter to know how much torque can reliably be transmitted. e.g. low tension = low power out
I’ve been doing simulations of the OTS (Open Tensegrity Shaft) by @someAWE_cb
Once the form finding in the model has settled, There appears to be more lag (angle between consecutive rungs) at the top of the shaft, compared to the bottom end of the shaft.
Have a look at
Weird.
I can’t think why that would be. I don’t remember seeing it in daisy ring to ring torque models.
Can you think of any reason for this model behaviour? (my model parameters must be out somewhere but would really appreciate anyone who can dig in)
Most of the kite lift and torque input tension is shown to be taken on straining the straight lines of an OTS… It’s possibly that my torque output method is setup wrong or just isn’t strong enough compared to the line tension thus only the top being twisty???..
If anybody is handy with Rhino 3d using grasshopper & kangaroo2 etc
I’d really appreciate 2nd opinions on the attached file.OTS19 bouncy to force finding.gh (123.8 KB)
Even better if anyone is clued up on the use of K2 Engineering plugin as per http://www.ceciliebrandt.com/cases/calibrated-modelling-of-form-active-structures/
There’s a thesis pdf there which describes how Cecile built, tested & used K2 Engineering.
Using this I’m hoping to get more calibrated data on structural forces from the form finding.
This is essential for reliable scaling data.
An improvement over my work would be to create a custom goal for the kangaroo 2 solver such the the torque force would be updated in the solver ( not externally fed back into the loop as is done now making the process slow)
However… after having settled the form finding model (Left hand side half of the .gh sketch)
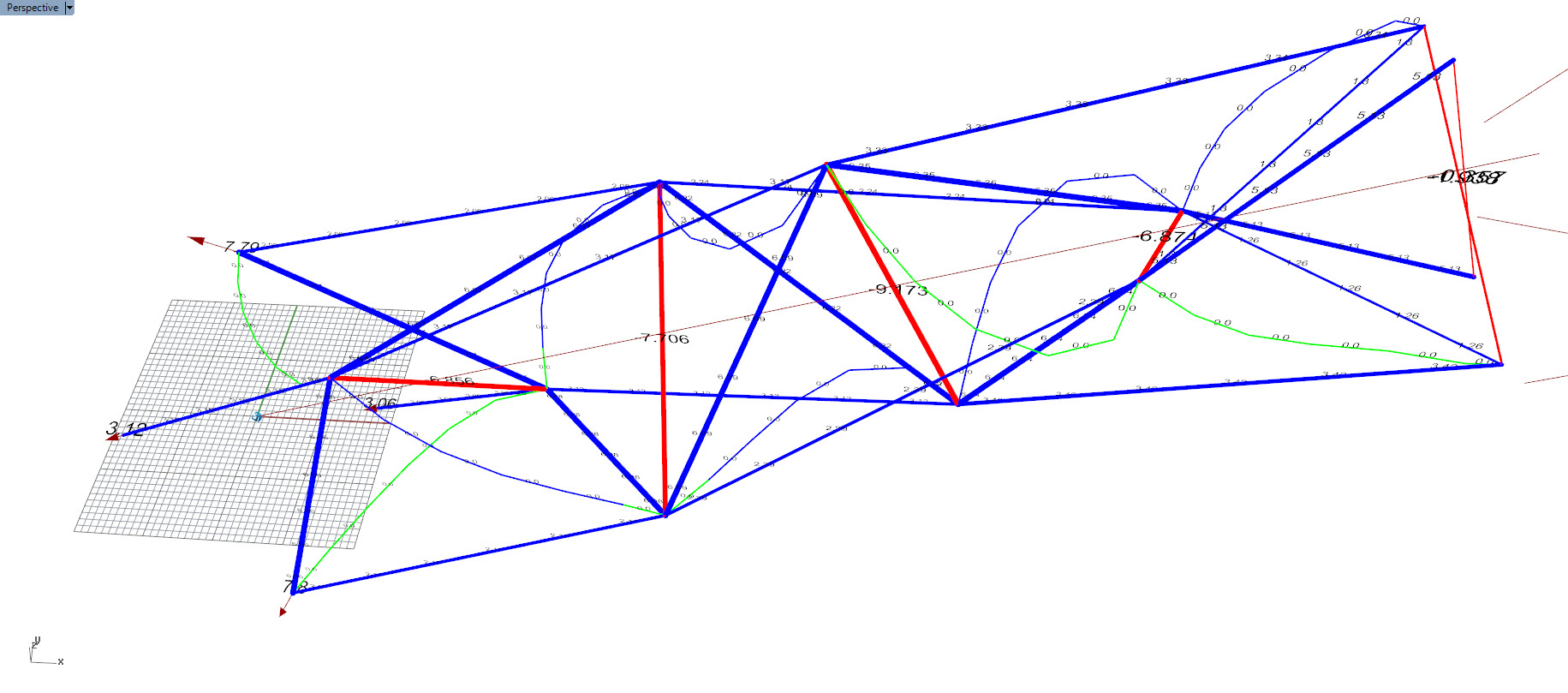
I’ve run the output through the K2Engineering system to get these line and rod axial forces also the anchoring forces.
No doubt there is still quite a bit of checking of my parameter data to do…
OTS20 settled bouncy to force finding bouncy.gh (123.6 KB)
The pic above is the result after settling the K2Engineering particle force balancing… Maybe because I set such a short length…? but the anchoring balance seems a lot cleaner half way through this sim vid…
I updated the analysis .gh sketch again and here’s a tutorial on how to use it.