First I’d like to commend Enerkite on great progress and a great video.
I don’t know many details of Enerkite’s concept. Still i was a bit surprised when seeing in their latest video it looks like they are using their rotary boom as an actuator during figure of eight flights. I would have expected the boom would face statically downwind and then the winches would take care of any reel in/out to compensate for gravity (reverse pumping)
Have a look at 1:20 and 1:45.
Also interesting is the tether noise (presumably) also caught on tape. I recognize the sound though the decibel level of course can not be made out. (as a preemptive comment, tether noise will presumably be a lesser issue when higher altitudes are attained with scale)
Typically during figure-eight, the pivoting part of the station rotates in a side then the other, following the kite path. An example (from 0:36):
As the rotary boom is a part of the pivoting part of the station, it turns with the rest of said station part.
I don’t think the rotary boom plays any role once the wing is in operation; it is simply not possible to get rid of it. The simplest thing is therefore that it rotates with the rest which must rotate.
I notice that the fullest figure-eight is shown at 0.55 (from the end): we can see the tracking of the pivoting part of the station which includes the rotary boom.
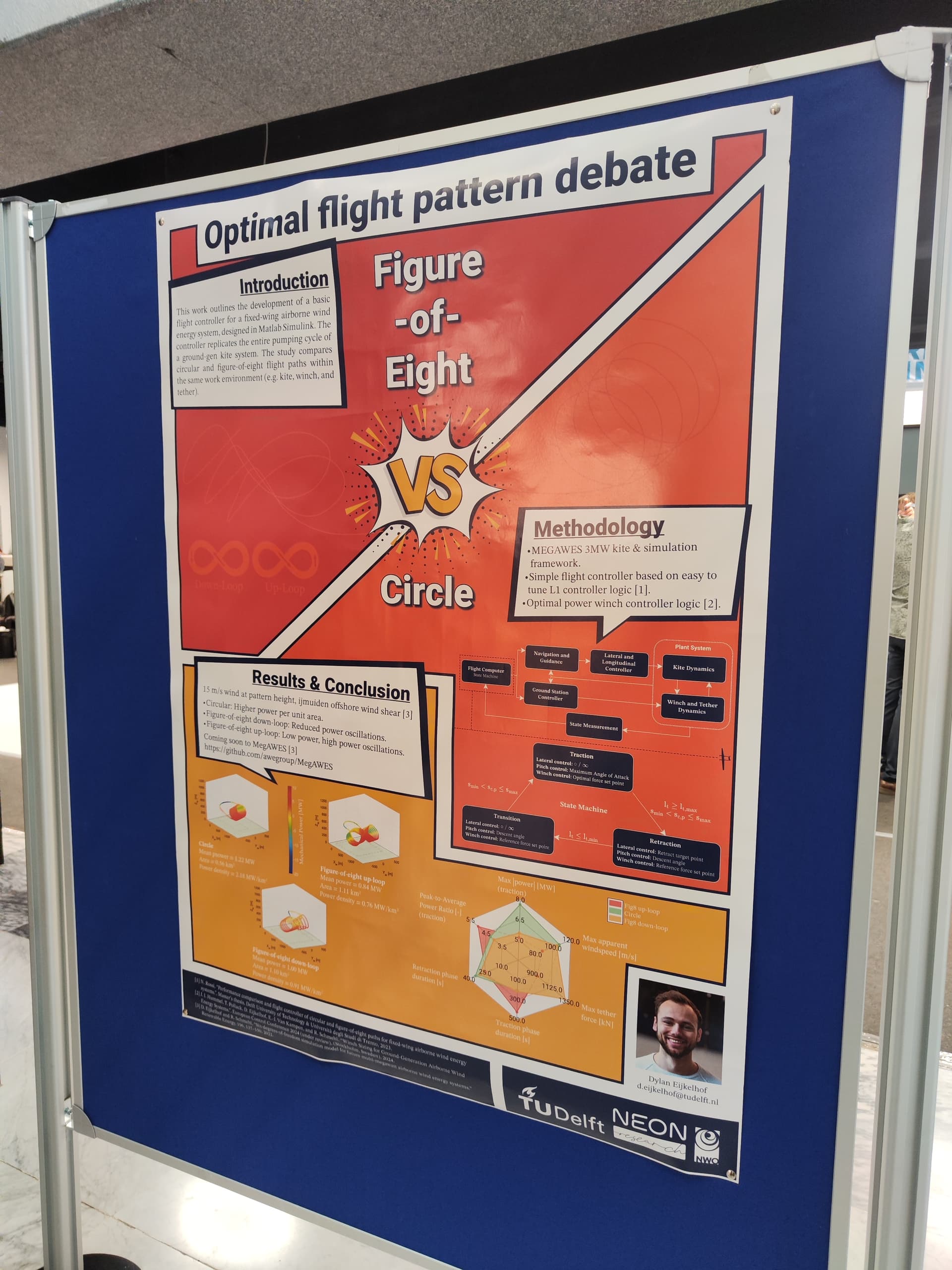
Wouldn’t that then impact the smoothness of the power production? I would think it’s better to keep that separate, like seems to be done here to keep a more consistent tension on the tether for the winch to exploit. Poster on power oscillations
Indeed (from take-off to operation phases), the boom (and the drums) seems to point more and more perpendicular to the tethers going to the kite, excepted during take-off where boom and kite are aligned (before tether unwinding).
Do you think this would then be a lever type conversion system, with the drums only being used to unwind the necessary tether length?
In my opinion this would be surprising, because it would mean that the generator is driven by the rotation of the boom, which seems unlikely to me.
It seems to me that during the take-off phase the boom (and therefore the drums) points directly towards the kite, as shown in the beginning of the video. We then see the shift between the orientation of the boom and the position of the kite as the tethers unwind in order to start the reeling cycle. In my provisional opinion, it is the continuation of the take-off phase, using the dynamics of the boom as you suggest. Otherwise, of what use would a boom of around twenty meters be compared to the hundreds of meters of tether in operation?
Maybe you misread me, I’m thinking it makes sense to deal with power oscillations, including gravity effects, by some other means than the winch. In this case it seems to be done by the boom, at least partially. At 01:14 you can see the boom pulling on the kite while it is going upward, and letting go when the kite has reached the top of the loop.
As for why, it seems better to let the generator keep up a more consistent spinning speed, for power production and probably longevity, and the drum would have rotational inertia probably too, and would then be less dynamically capable like you say. Only downside maybe is if moving the boom takes too much energy.
This seems obvious to me so I’m interested why, or if, you are thinking differently?
It never occured a sound option compared to winching. I would think energy conversion of the rotary motor would be less efficient. Maybe the spinning mechanism would be hydraulic even?
Maybe they are just pumping the kite with the arm in the low wind… The drums do seem more responsive than the arm and seem would take less energy to rotate. But exclusively using the winch during energy generation would ignore the issues the paper I quoted raises, if I understand them correctly.
During the harvesting phase, the wing flies eight-shaped paths in the wind and, which produces large forces that pull ropes from the drums of the ground station. A generator converts this rotation of the drums into electricity (G). As soon as the wing reaches the rope’s end, it glides back to the initial height. The tethers are rewound with minimal energy input, and the cycle repeats again.
Fully automatic take-off and landing with a rotating mast
The operation of our systems is fully automatic and remotely monitored. To achieve maximum energy yield, we have eliminated propellers and motors on our wing. Instead, we developed a unique launch system that enables take-off even when there is no wind at ground level: the rotating launch. A rotating mast pulls the wing to heights with sufficient wind. The same principle works for the landing, where the wing approaches the ground station in a circular flight and lands on the mast.
This is what we see in the video: the rotating mast for take-off, the drums for electricity production.
If hypothetically the mast were used as a lever, it would have to be longer than it is in relation to the tether, and the rotational movement at low angular speed and very high torque would activate a hydraulic installation comprising hydraulic accumulators and hydraulic motors as on the device linked in my previous comment.
Well the boom does have hydraulic [i assume] pistons meaning they also have a HPU [hydraulic power unit] onboard, meaning again that it would make a lot of sense to have hydraulic motors and acuators here and there.
Such items would be cheap and powerful for their size.
I would not assume though that they in any way are recovering/regenerating power from the hydraulic system. Thus using the boom to adjust tether length would be a pure loss power wise.
My reckoning (not that I understand why any AWES team does line pumping)
It’s probably smoothing flight and boosting low wind climb rate.
Using both hydraulic and winch actuation gives you a faster stronger response for short a term line tension enhancement solution.
(Short term because the boom arm misalignment at that line length can’t affect tension long term because it’s relative length)
Hey it’s a lovely bit of flying and launching
Hi Tallakt, I spotted the same weird motion when looking the video the first time. I first thought it was just a kind of bug. I also noticed the lines are not pulling aligned with the arm, put perpendicular to the arm, in order to be able to pull the kite in rotation, and that as the results the pulleys for backlines were not symmetric (see 1’32’’ before the end). And I have just realized the two might be linked: you need to keep the arm perpendicular as the system might currently be designed for lateral load.


{kind=link}