Hi. I would like to toss out a few things I have been looking at lately, trying to answer; what is an optimum structure of a TRPT [tensile rotary power transfer] shaft.
We have seen some examples of this already
- Windswept and Interesting’s Daisy [and other] design
- someAWE
- Sketches featuring a single shaft segment and a ground rotary track or cartwheel
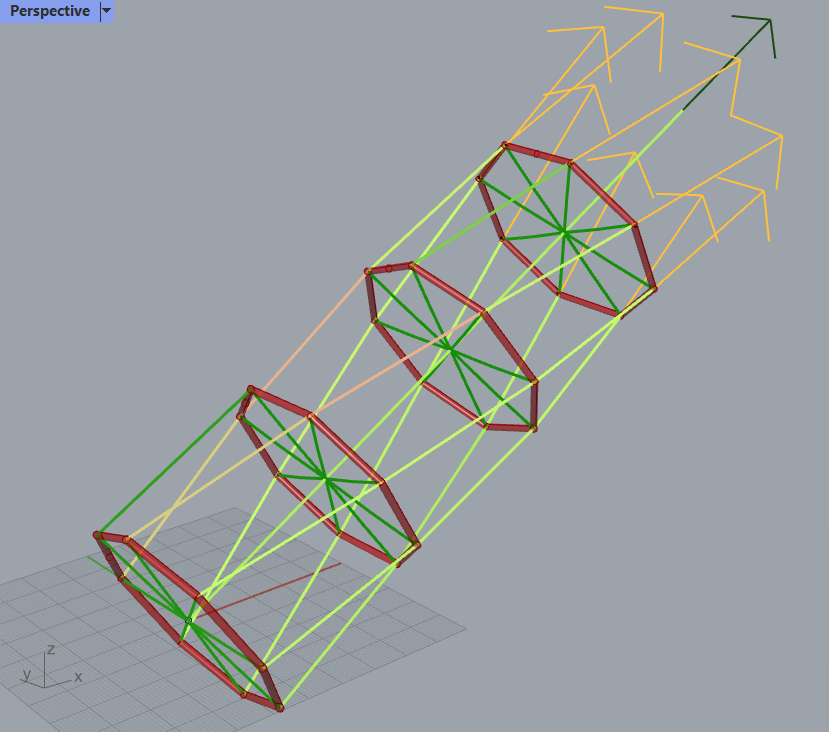
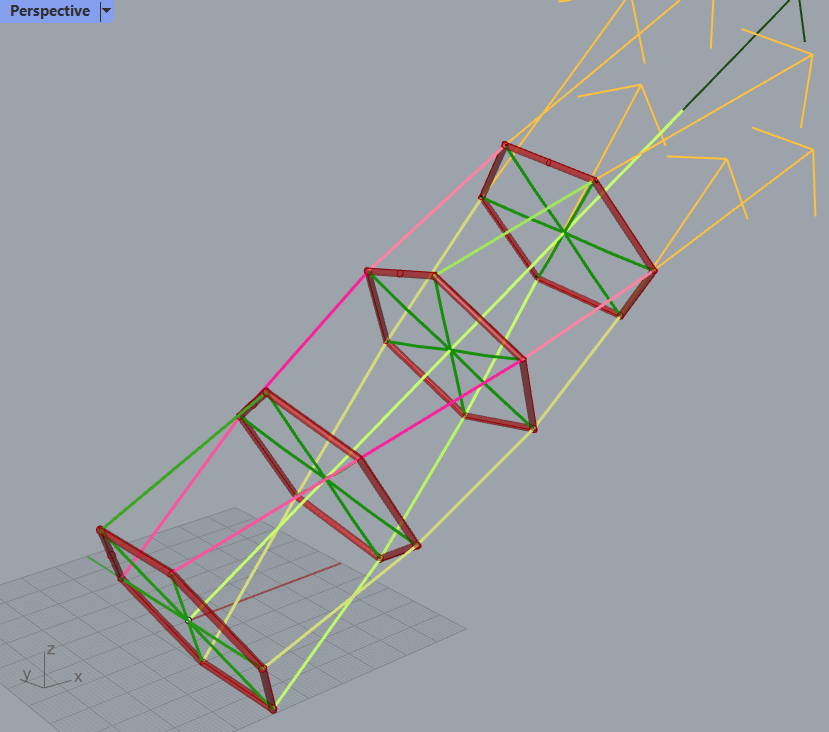
First just some physics. We assume that the shaft is made out a stack of n segments. Each segment is supported at each connection layer by rigid expansion force elements or ultimately the kite lift and centrifugal force. The shaft is dependent on a shaft tension we’ll call T_N in the direction of the shaft. Each segment will twist due to the moment the shaft carries, we’ll call the twist angle in a segment for \theta.
I will not provide all calculations here, but hope you can “buy” these conclusions here or maybe provide some disagreement reasons. So this is basically just a listing of results I have come up with.
First, the maximum shaft tension happens when a segment has a twist angle of \theta \approx 90^\circ. Though the shaft may not collapse before \theta = 180^\circ.
The kite looping radius is r. Maybe if there are many layers and different looping radii, this must act as an average approximation for now. The radius at either end of a segment is r_0 and r_1 for segment 0. We will define the MTR value [moment per tension per radius] as
K_{MTR,0} = \frac{\tau}{T_N r_1}
… for segment 0 and so on
To achieve a certain MTR value for the whole shaft, each segment must satisfy
K_{MTR,0} = K_{MTR} \frac{r}{r_1}
.. for segment 0 and so on.
For a glide number of the tether and kite together at 5, the MTR value must be greater than 0.1. In general an approximated MTR value requirement is given by
K_{MTR} > \frac{1}{2 \frac{C_L}{C_D}}
The higher the glide ratio of the system, the lower the MTR value may be.
The MTR value itself may be approximated by
K_{MTR} \approx \frac{r_0}{l_0}
… where l_0 is the tether length of shaft section 0, if the section is long and slender.
–
Having laid this foundation, I would like to state some observations regarding the three options listed at the beginning, as a base hopefully for some feedback and discussion
Daisy
The daisy features a few segments with rings and thus is a middle ground between the two alternatives. So I will not mention it further
someAWE
By having a top section of limited tether length and then reducing the shaft to quite numerous small radius sections, the tether drag is very limited. The MTR value must be quite high due to the high value of \frac{r}{r_n}. Also, if a gust hits, each segment must find its new \theta_n to match the new desired torque \tau of the shaft. These \theta_n add up, causing the phase difference of the cartwheel at the ground and the kite rotation to become very large. This maybe leads to a very hard to control system, moment-wise. I have a feeling that from what we are seeing on released videos, maybe the radius of the shaft may well be increased slightly to reduce this phase difference. On the positive note, the shaft extends “forever” without essentially any added tether drag. Only the mass of the shaft may become an issue, causing waves in radial direction and in \theta. My guess is such a design is very dependent on accurate readings of the kite phase angle to be available at the ground. The shaft essentially is uncontrollable, so any waves must be dampened on either the airborne or ground side.
Single segment TRPT
These don’t have the issues as seen with the numerous elements of someAWE with waves in the shaft. The shaft does not have much weight other than the tethers themselves. On the other hand, such shafts have the inherent quality that they can’t be very long due to the way K_{MTR} depends on \frac{r_0}{l_0}. So to get around this, a huge cartwheel at the ground in addition to a tower is necessary for this to be practically feasible. Also, as the shaft does not have a convex outline, tether drag is significant, making it hard to get the TSR above 10.

 /cb
/cb