George
February 1, 2020, 11:26am
21
2 Likes
George
February 3, 2020, 10:25am
30
Potential technology for MAWES launch
1 Like
tallakt
February 3, 2020, 3:14pm
31
Pretty impressive actually
A large polar moment of inertia was the main driver for me choosing to investigate Tensile Rotary Power Transmission using large diameter rigid rings (polygons now) and multiple connecting lines.
1 Like
https://web.archive.org/web/20200708195049/http://www-h.eng.cam.ac.uk/outreach/Project-resources/Wind-turbine/howwingswork.pdf
How do wings work?
Abstract
If the above link doesn’t work, the original link is still up: http://www-h.eng.cam.ac.uk/outreach/Project-resources/Wind-turbine/howwingswork.pdf
https://www.iris.unina.it/retrieve/handle/11588/708050/174883/root.pdf | Archive link
Aerial Manipulation: A Literature Review
Fabio Ruggiero, Vincenzo Lippiello, Anibal Ollero
Abstract—Aerial manipulation aims at combining the versatility and the agility of some aerial platforms with the manipulation capabilities of robotic arms. This letter tries to collect the results reached by the research community so far within the field of aerial manipulation, especially from the technological and control point of view. A brief literature review of general aerial robotics and space manipulation is carried out as well.
https://hal.archives-ouvertes.fr/hal-01285318/document | Archive link
Observer-based Control of Position and Tension for an Aerial Robot Tethered to a Moving Platform
Marco Tognon, Sanket S. Dash, and Antonio Franchi
Abstract—In this paper we address a challenging version of the problem of controlling tethered aerial vehicles (also known as UAV, MAV, and UAS) by considering the aerial robot linked to a generic and independently moving platform. We solve the exact tracking control problem for both the 3D position of the robot (either absolute or with respect to the platform) and the tension along the link. To achieve this goal we prove some fundamental system properties, useful to design a nonlinear controller, such as differential flatness and dynamic feedback linearizability. To close the control loop a set of minimal and standard sensors is proposed. Then we show that it is possible to retrieve the full system state from those sensors by means of nonlinear measurements transformations and a bank of low-dimension estimators based on the nonlinear high gain observer. The ability of the proposed observer- controller method is tested by extensive numerical simulations spanning many non-ideal conditions.
Index Terms—Aerial Robotics, Underactuated Robots
https://hal.archives-ouvertes.fr/hal-01350883/document | Archive link
Takeoff and Landing on Slopes via Inclined Hovering with a Tethered Aerial Robot
Marco Tognon, Andrea Testa, Enrica Rossi and Antonio Franchi
Abstract— In this paper we face the challenging problem of takeoff and landing on sloped surfaces for a VTOL aerial vehicle. We define the general conditions for a safe and robust maneuver and we analyze and compare two classes of methods to fulfill these conditions: free-flight vs. passively tethered. Focusing on the less studied tethered method, we show its advantages w.r.t. the free-flight method thanks to the possibility of inclined hovering equilibria. We prove that the tether configuration and the inclination of the aerial vehicle w.r.t. the slope are flat outputs of the system and we design a hierarchical nonlinear controller based on this property. We then show how this controller can be used to land and takeoff in a robust way without the need of either a planner or a perfect tracking. The validity and applicability of the method in the real world is shown by experiments with a quadrotor that is able to perform a safe landing and takeoff on a sloped surface.
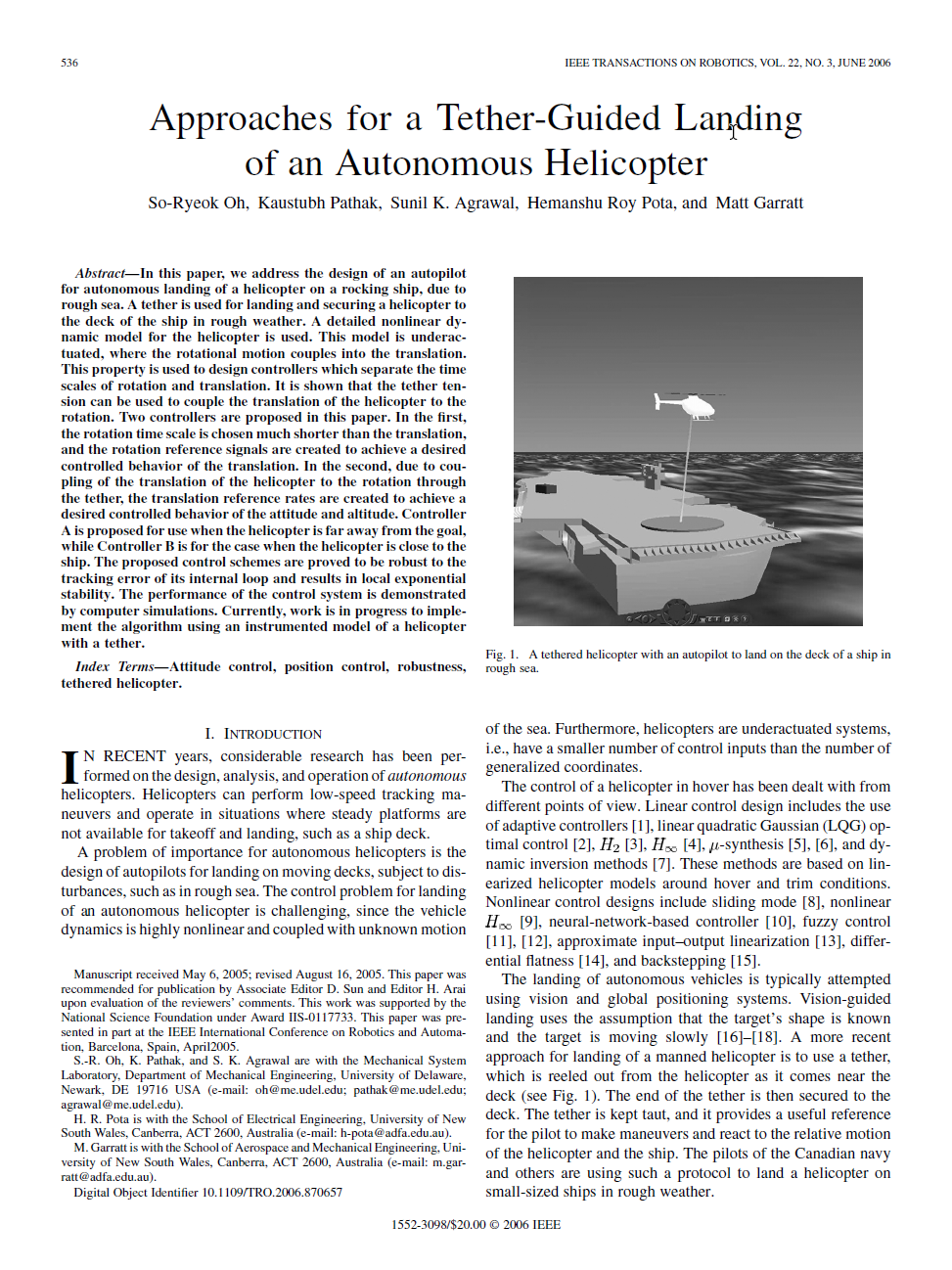
https://www.researchgate.net/profile/Matt_Garratt/publication/3450312_Approaches_for_a_tether-guided_landing_of_an_autonomous_helicopter/links/0c960528168f146340000000/Approaches-for-a-tether-guided-landing-of-an-autonomous-helicopter.pdf Archive link
Approaches for a tether-guided landing of an autonomous helicopter
https://www.researchgate.net/profile/Michael_Duffy20/publication/301473784_The_LIFT_Project_-_Modular_Electric_Vertical_Lift_System_with_Ground_Power_Tether/links/5a2d5766aca2728e05e2df14/The-LIFT-Project-Modular-Electric-Vertical-Lift-System-with-Ground-Power-Tether.pdf Archive link
The LIFT! Project – Modular, Electric Vertical Lift System with Ground Power Tether
Michael J. Duffy and Tony C. Samaritano
The LIFT! Project explored scaling of all-electric multi-rotor propulsion, ground powered tether technologies for large multi-rotor aircraft, and methods of cooperation between multiple VTOL aircraft. Multi-rotor aircraft have become pervasive throughout the hobby industry, research institutions, etc. due - in part - to very powerful, inexpensive inertial measurement devices and increased energy density of Li-Ion batteries driven by the mobile phone industry. Although the energy density of Li-Ion batteries have enabled all-electric flight, the currently available Li-Ion battery energy density severely limits flight times and useful load capabilities of all electric aircraft. The LIFT! Project’s objective was to leverage emerging electric aircraft architectures to demonstrate modular lifting units for short distance missions. The all-electric propulsion architecture developed for the LIFT! Project allows for ground power delivery capabilities via a high-voltage tethering system which enables greatly increased flight time and increased useful load capabilities. This paper outlines the LIFT! Project’s powered tether implementation while demonstrating the effectiveness, modularity and scalability of electric multi-rotor technologies for large, electric, unmanned multi-rotor aircraft. This research offers new insights on the feasibility of large electric VTOL aircraft, empirical trends, ground powered operations, potential markets, and future research necessary for the commercial viability of electric VTOL aircraft.
WIND TUNNEL MEASUREMENTS OF PARAFOIL GEOMETRY AND AERODYNAMICS | Archive link
ABSTRACT
1 Like
There’s further progress mentioned in the conclusion of the aerial manipulation paper…
programs in remote aerial inspection (AIRobots, [111]),
Makes me feel like lift kite management by drone is just around the corner every time I read one of these
1 Like
Tethered landing of a helicopter in wind is difficult because the moments and lift force of the rotor will depend on the orientation of the rotor vs the wind. If the authors start writing about H_\infty before describing this, I believe they still have some distance to travel…
1 Like
It’s an old (2006) paper. It was cited 138 times . One can go down (up) different rabbit hole branches to find more recent studies, like those below for example. Do you know of other research?
Herissé, B., Hamel, T., Mahony, R., & Russotto, F.-X. (2012). Landing a VTOL Unmanned Aerial Vehicle on a Moving Platform Using Optical Flow. IEEE Transactions on Robotics, 28(1), 77–89. doi:10.1109/tro.2011.2163435 | Archive link
https://ieeexplore.ieee.org/abstract/document/6696698
Stabilization of a flying vehicle on a taut tether using inertial sensing
Abstract: Given a hover-capable flying vehicle attached to a fixed point by a taut tether, we present a novel method to recover the vehicle’s relative position and absolute orientation. The proposed method requires only on-board inertial sensors, and indirectly measures the string force, enabling the additional use of the tether as a physical user interaction medium. We present the vertical-plane dynamics of such a system and the localization approach, discuss sensitivity issues, and implement an estimator and controller based on the presented model. We demonstrate the method experimentally on a tethered quadrocopter in the Flying Machine Arena, using both a vertical-plane-constrained vehicle and in 3D.
https://arxiv.org/pdf/1904.07996.pdf | Archive link
Benchmarking Tether-based UAV Motion Primitives
Xuesu Xiao, Jan Dufek, and Robin Murphy
Abstract— This paper proposes and benchmarks two tetherbased motion primitives for tethered UAVs to execute autonomous flight with proprioception only. Tethered UAVs have been studied mainly due to power and safety considerations. Tether is either not included in the UAV motion (treated same as free-flying UAV) or only in terms of station-keeping and highspeed steady flight. However, feedback from and control over the tether configuration could be utilized as a set of navigational tools for autonomous flight, especially in GPS-denied environments and without vision-based exteroception. In this work, two tether-based motion primitives are proposed, which can enable autonomous flight of a tethered UAV. The proposed motion primitives are implemented on a physical tethered UAV for autonomous path execution with motion capture ground truth. The navigational performance is quantified and compared. The proposed motion primitives make tethered UAV a mobile and safe autonomous robot platform. The benchmarking results suggest appropriate usage of the two motion primitives for tethered UAVs with different path plans.
Some landing+tether search results:
A Survey of Autonomous Landing Techniques for UAVs | Archive link
Abstract—Landing an aerial vehicle is a very challenging problem. Pilots spend numerous hours practicing touchdowns because of the risk involved during landing phase. Developing autonomous landing technologies have been an active area of research over the past decade. This paper presents a review of landing techniques ranging from GPS based landing to vision based landing techniques; from basic nonlinear to intelligent, hybrid and robust control. It is aimed at providing a broad
https://repository.tudelft.nl/islandora/object/uuid:58616891-5447-446b-86e5-f190dbc9ede9 | Archive link | AWES forum link
Vertical Takeoff and Landing of Flexible Wing Kite Power Systems
Abstract
In this work, a novel vertical takeoff and landing methodology for flexible wing kite power systems is presented. Starting from a basic mast-based launching and landing concept, the operational envelope will be enlarged using the external assistance of a multicopter. The multicopter is used to drag the kite along a specified launching path until the operational altitude is reached, where the kite is detached and steered to its characteristic parking position while the multicopter lands. The landing of the kite will be conducted without multicopter assistance, and solely the winch will be used to pull the kite toward the ground station. For all maneuvers, flight control algorithms are presented, and the feasibility of the proposed methodology is analyzed using a developed simulation environment incorporating models for the kite, multicopter, ground station, and the tethers that connect the individual subsystems.
Guideline for Preliminary Sizing of a Vertical Take-Off and Landing System for | Archive link
Abstract
In this work the launching method VTOL is described using a mathematical model. This model can be used for a preliminary design regarding the size of the launching structure for a given AWE drone. In order to do so, important aircraft parameters are needed as an input and the required on-board power as well as the capacity of the energy storage are determined.
A critical requirement for an efficient power generation is a light-weight aircraft. Therefore, minimizing the weight of the VTOL system should be considered as one of the main objectives when designing the aircraft. In this work it is proposed to utilize the aerodynamic force to reduce the needed propeller thrust and hence minimize the required power for launching. Based on relevant equations describing the take-off procedure, a guideline for the design of such a VTOL system is presented.
To describe the launching sequence more accurately and investigate the effect of different flight paths on the needed thrust, a dynamic model is introduced and simulations on different start and landing sequences are carried out. Thereby, two control approaches are compared to each other focusing on the ability to optimally use the aerodynamic force to reduce the required propeller action. This leads to a recommendation of how the launch should be executed in order to be realizable with a light-weight VTOL system.
In this thesis it could be shown, that maximizing the aerodynamic force has a great potential regarding the reduction of the needed rotor thrust. This effect has not yet been investigated in the literature and should be considered when dealing with take-off and landing systems. Furthermore, it offers possibilities to novel control approaches, which optimally uses the aerodynamic force. The proposed control structure leaks in generality since it can only be applied in 2D models. Nonetheless, it gives an insight into the potential of using the aerodynamic force for control purposes.
Take-off and landing of an AWE system using a multicopter | Archive link
Abstract— In this paper, the problem of take-off and landing of an airborne wind energy system is addressed. The solution explored is to equipe the airborne wing of the system with a multicopter drone in order to perform the take-off and land maneuvers, even in the absence of wind. The proposed model with the proposed control strategy is implemented and tested in a numerical environment. The results show efficiency of the proposed control law and its robustness with respect to modelling errors and wind gusts.
2 Likes
How to save 51 billion lives for 68 cents with simple Engineering – Mark Rober