This topic looks a bit like Flettner balloon and VAWT side by side but there are significant differences because of the use of Savonius rotor kites that generate torque and can flight alone by themselves. Both Savonius and Darrieus rotors are VAWT. So I think this topic could allow to clarify the set of possibilities in this field.
Savonius kite VAWT generate both torque and lift by Magnus effect. Darrieus VAWT generate only torque but sweep a larger wind area and are more efficient.
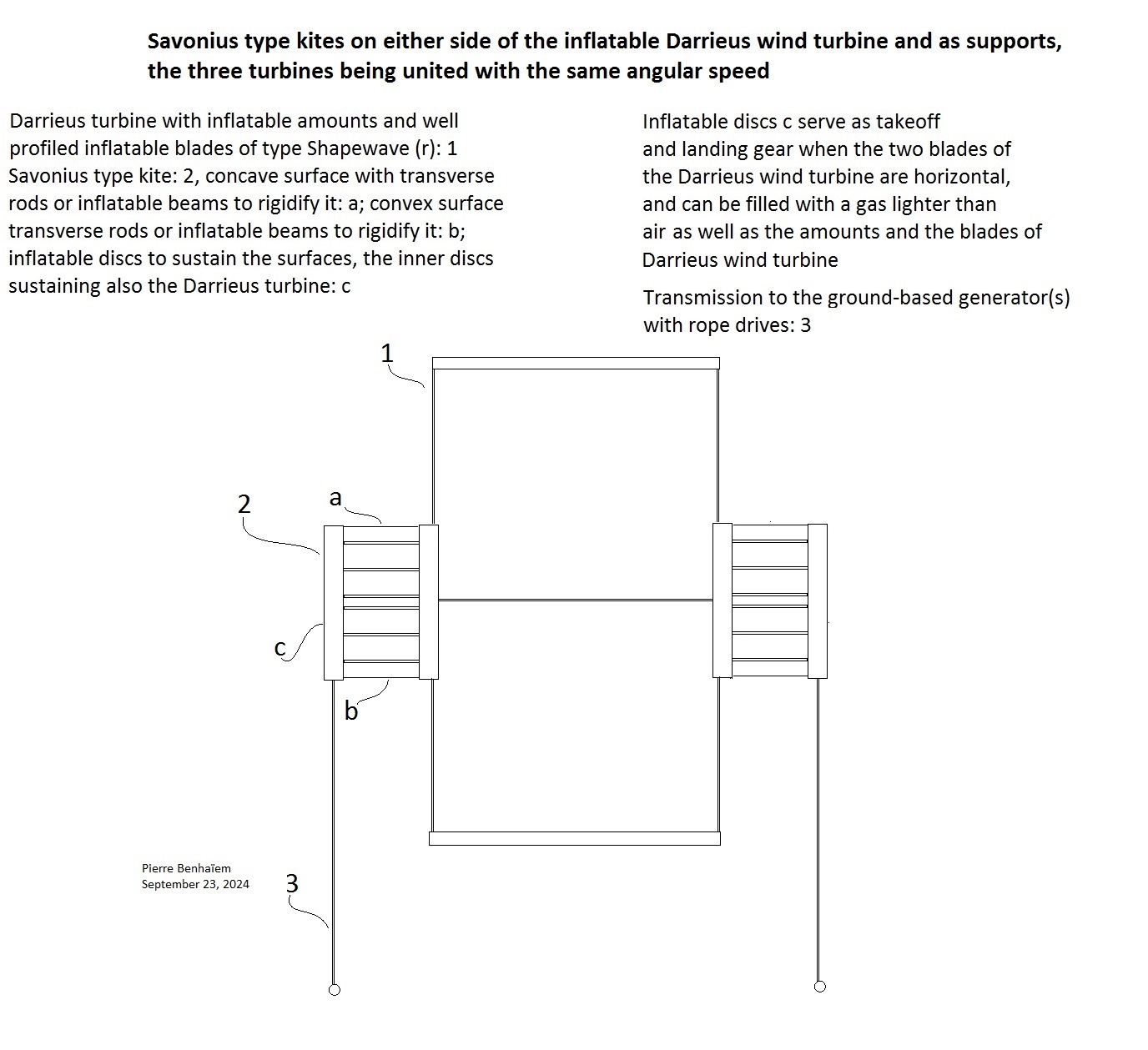
As the VAWT shown here sweeps a large area, the Savonius rotors may need to be longer in order to counter the drag generated by the VAWT. The sole purpose of rope drives is to transmit torque from the combined VAWT and Savonius rotors. The TSR of a Savonius kite can be estimated at 1, and that of a VAWT at 3, perhaps more. Their respective diameters are adjusted, just like the Sharp balloons with their VAWT. The discs are of a much smaller diameter than that of the VAWT which then includes amounts supporting the blades. A lattice of inflatable bars can increase the rigidity of the VAWT. Usually a Savonius turbine is installed inside a Darrieus turbine to help starting. But such a disposition would destroy the lift of a Savonius turbine settled horizontally as shown with tests using a Sharp rotor inside the Darrieus VAWT. It is the reason why Savonius rotors are settled externally to the main Darrieus VAWT.
During very old tests I noticed that Savonius kites had a good torque, being able to rotate a Flettner rotor of same dimensions, the whole flying. The same applied for Darrieus VAWT with the difference that the Magnus cylinder lifted frankly but the whole thing was unbalanced and did not really fly because the Darrieus VAWT does not generate Magnus effect.
It looks that both Savonius and Darrieus VAWT could lead to a successful combination, the Savonius VAWT being settled at each side of the Darrieus VAWT because they generate lift by Magnus effect, in addition to the high torque helping start.
All parts are inflatable except for the fabrics inside Savonius kites. A gas lighter than air can fill the inflatable parts. For this arrangement, the elements are light, and the part lighter than air can be reduced or even perhaps eliminated.
Caption
Savonius rotor kites have three advantages: they are self-rotating, generate torque, and can fly like kites without additional lighter-than-air gas under certain stability conditions. Their low TSR is not a major disadvantage because, just like the Flettner rotors (under penalty of excessive energy consumption for rotation), it must match the angular speed of the main Darrieus VAWT, and therefore be of a smaller diameter.
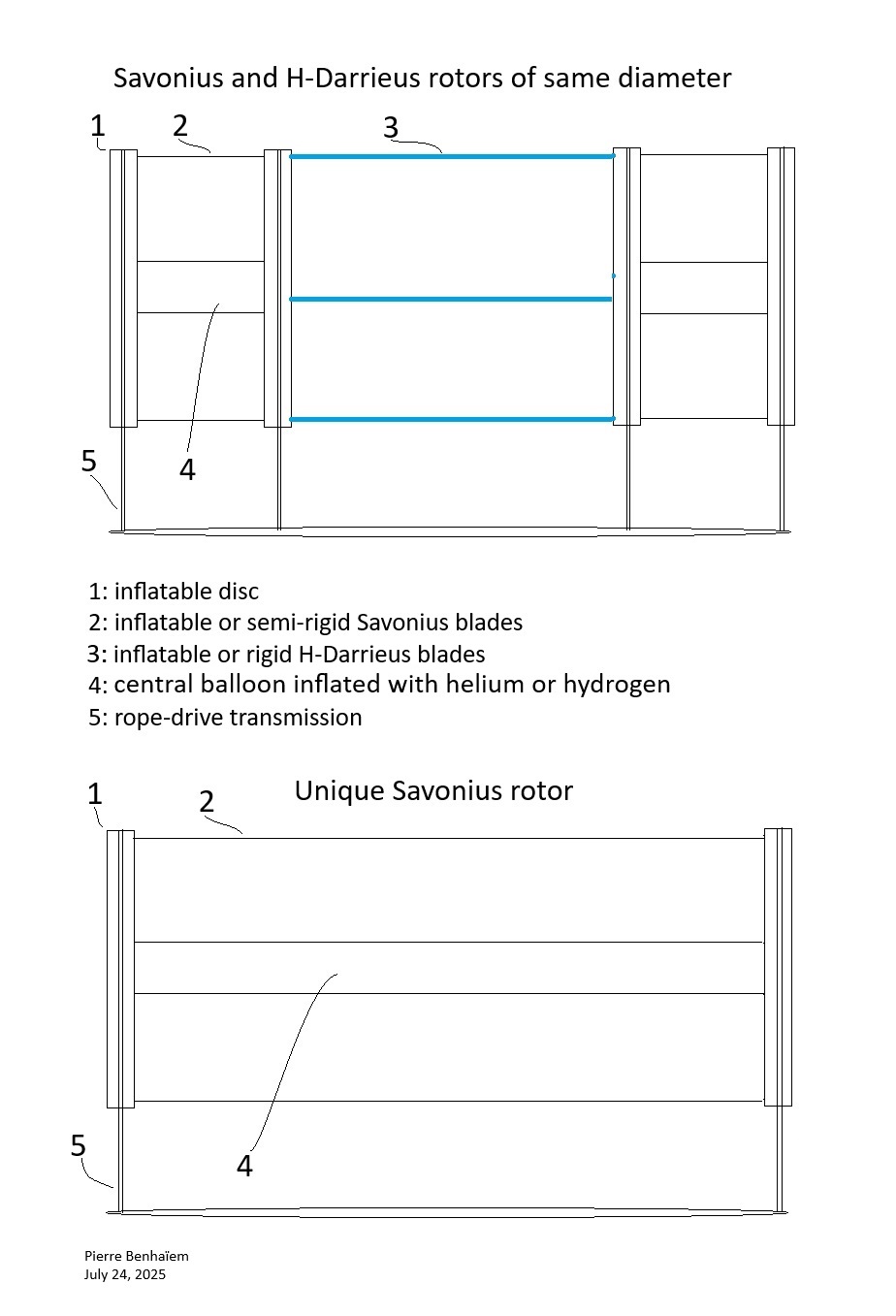
Savonius and H-Darrieus rotors of same diameter and same TSR
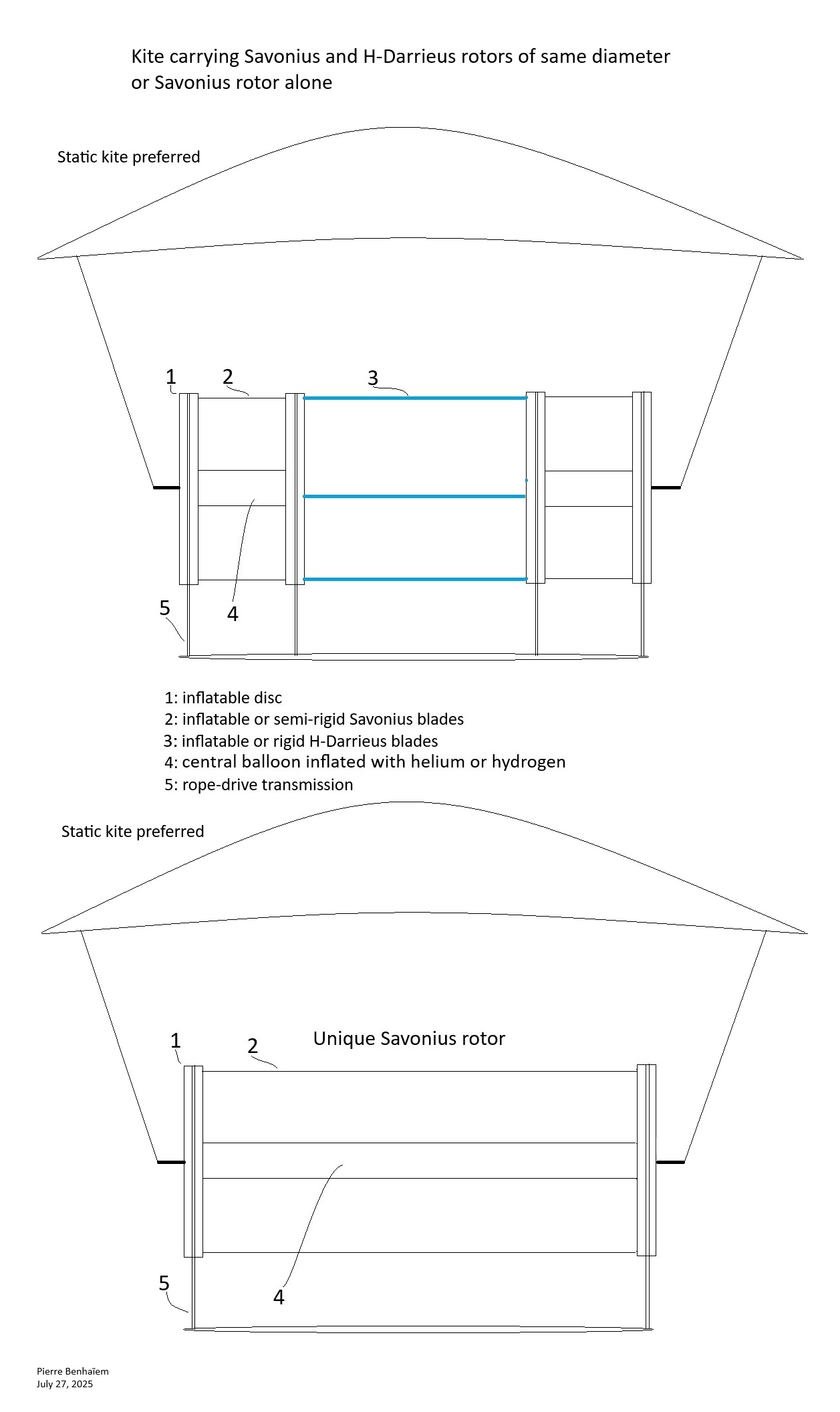
The Figure 6 [6] represents curves indicating that a high or correct power coefficient (Cp) at a low TSR (below 1) with cambered blade at a relatively high solidity. As a result, the Savonius and H-Darrieus rotors can be of same diameter, as shown on the sketch below. Two advantages are an easier maneuver, and a lesser deformation problem [4] when inflatable [2 and 3] H-Darrieus blades are used.
Unique Savonius rotor
A unique Savonius rotor could also be implemented to simplify.
Sketch
The two types of rotors described above are represented in the sketch below.
Design of the Savonius rotor(s)
The publication titled “Magenn Power Inc. - Magenn Air Rotor System (MARS)” [5] indicates a new design of “MARS” (Savonius) rotor in the pages 25, 26 and 27. The sketch above picks up certain elements but not “The moveable “clamshell” style blades were operated with compression cylinders, allowing them to pivot open and then retract during each rotation cycle” (page 25 [5]). Indeed, this would lead to an excess of complexity and a possible loss of Magnus effect. The selected elements are the large and well-shaped blades around the balloon. They are fixed on the inflatable discs which include the rope-drive transmission leading to a greater lightness because the generator is at ground.
About the “Unique Savonius rotor” represented on the sketch on the previous comment:
Unique Savonius rotor
A unique Savonius rotor could also be implemented to simplify. To enable greater scalability
and improved attachment of the S-shaped blades, the central balloon could be a
SHAPEWAVE® beam [3], where the “pressure class” is “0.5-1.0 bar”, or a Tensairity® beam
[7], leading to both lightness and stiffness. An envelope including a light rigid frame could
also be a possibility.
I am concerned that the cable drive used in these schemes will not satisfactorily work. The tension in the cable drive must be high. In the case of the above, the device generates the tension, whereas, in the case of the Kitewinder system, the tension is supplied by a lifter kite which is separate.
The balloon-based device would generate tension by drag and by lift (Magnus effect) forces, plus aerostatic force.
Indeed the non-separation of device for tension and device for rope-drive transmission can perhaps be an issue. Experiments would be required to see if the transmission works well and is smooth enough.
I remember an old experience with the Sharp rotor. I placed a sort of rope-drive around (although the Sharp rotor is not quite circular in shape), intended to drive a pulley in free spin under the effect of the wind. No rotation.
But when I manually operated said pulley, the Sharp rotor turned easily. At that moment, I thought that the low torque of the Sharp rotor was insufficient to generate rotation by driving a pulley, even in free spin.
However, I just repeated the experiment with a kite airplane with rotating wings utilizing Magnus effect, whose wing profile is quite close to that of a Savonius rotor. The same result: no rotation with the fan when I put a loop around a rim surrounding a wing, while I could easily rotate the Sharp rotor manually by acting the same pulley through the same rope-drive.
I believe that the tension, which is nonetheless necessary, prevents rotation. As you suggest, the tension should mainly be provided by another separate element, like Kiwee’s kite lifter.