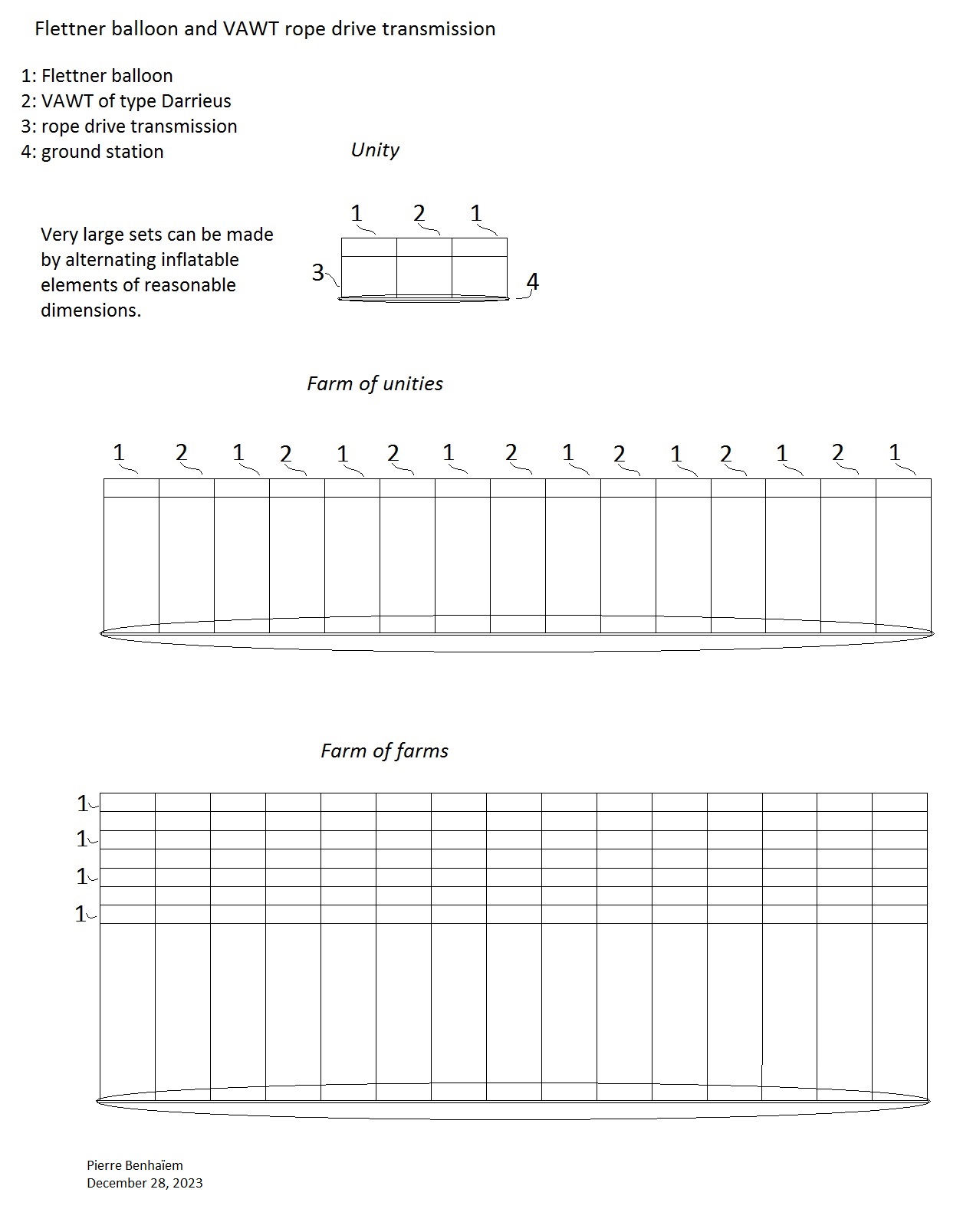
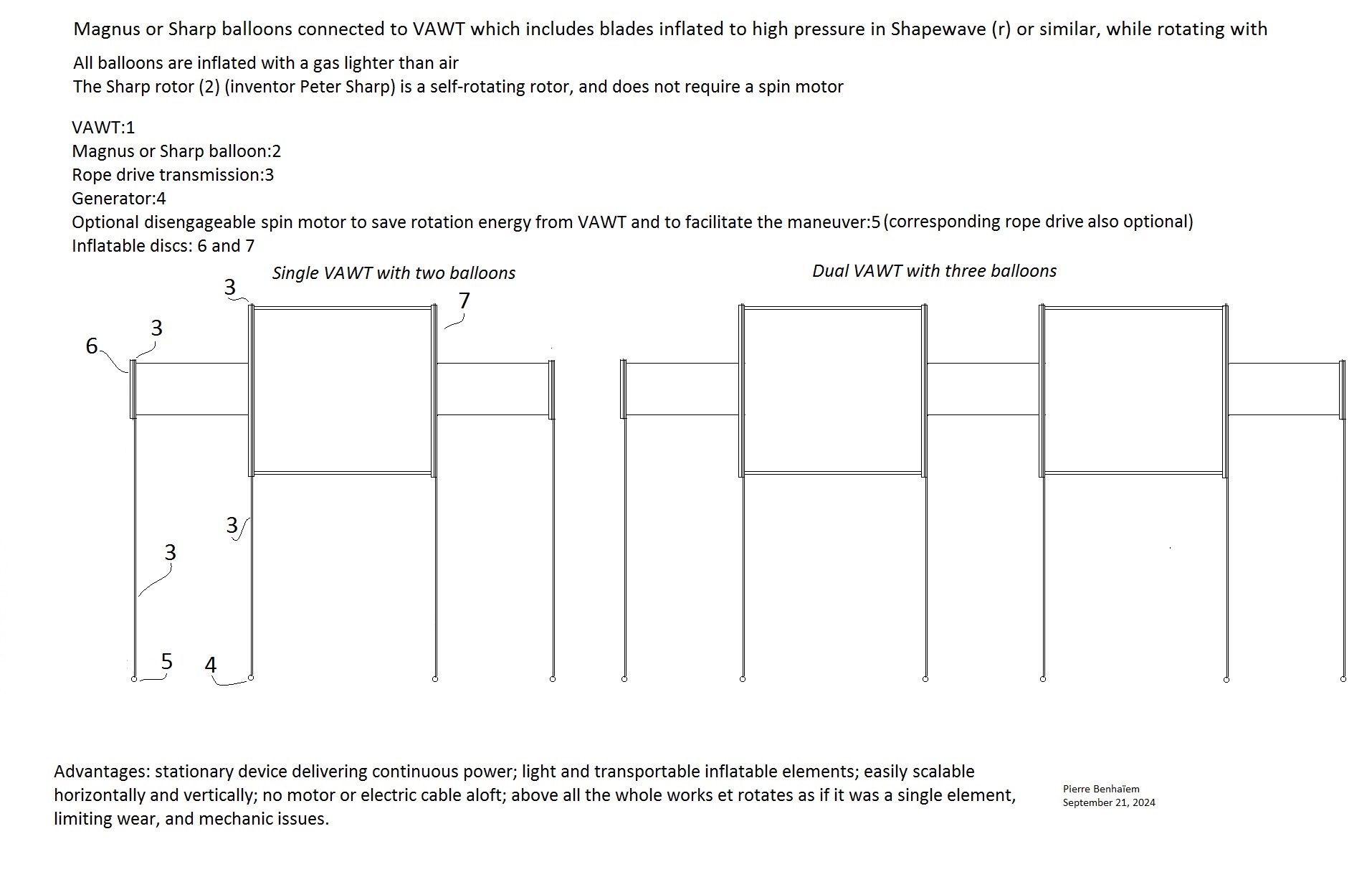
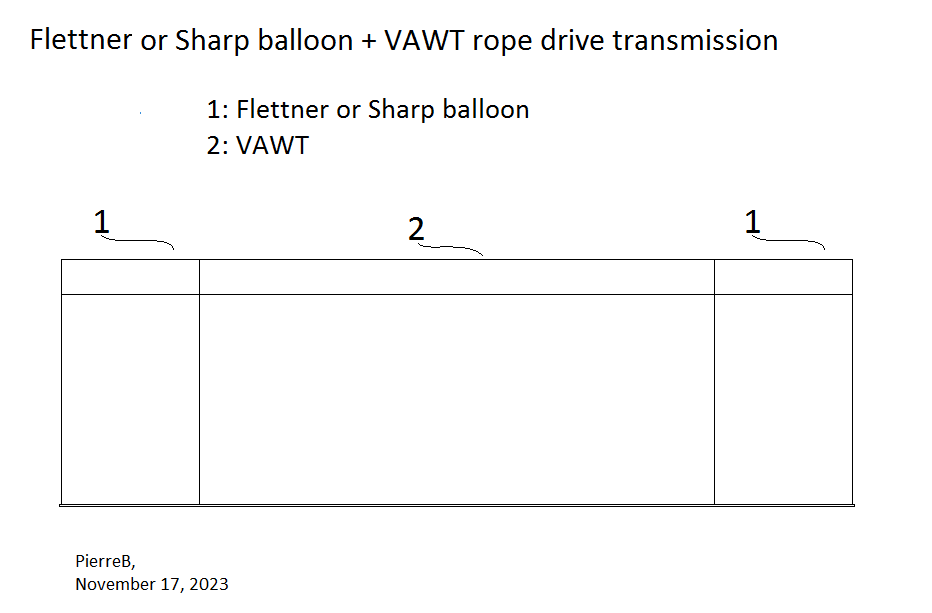
It can be interesting to simplify the AWES when all elements are rotating, working together, and by using rope drive transmission, being stationary. Stacking could also be easier.
Magenn proposed a sort of balloon surrounded with blades of type Savonius. In this conception the Magnus effect is operating at the tip of said blades, and not at the level of the balloon which “eats” the area concerned by both Magnus effect and the swept area for power generation. And this type of AWES using Savonius blades are difficult to achieve, while being not efficient.
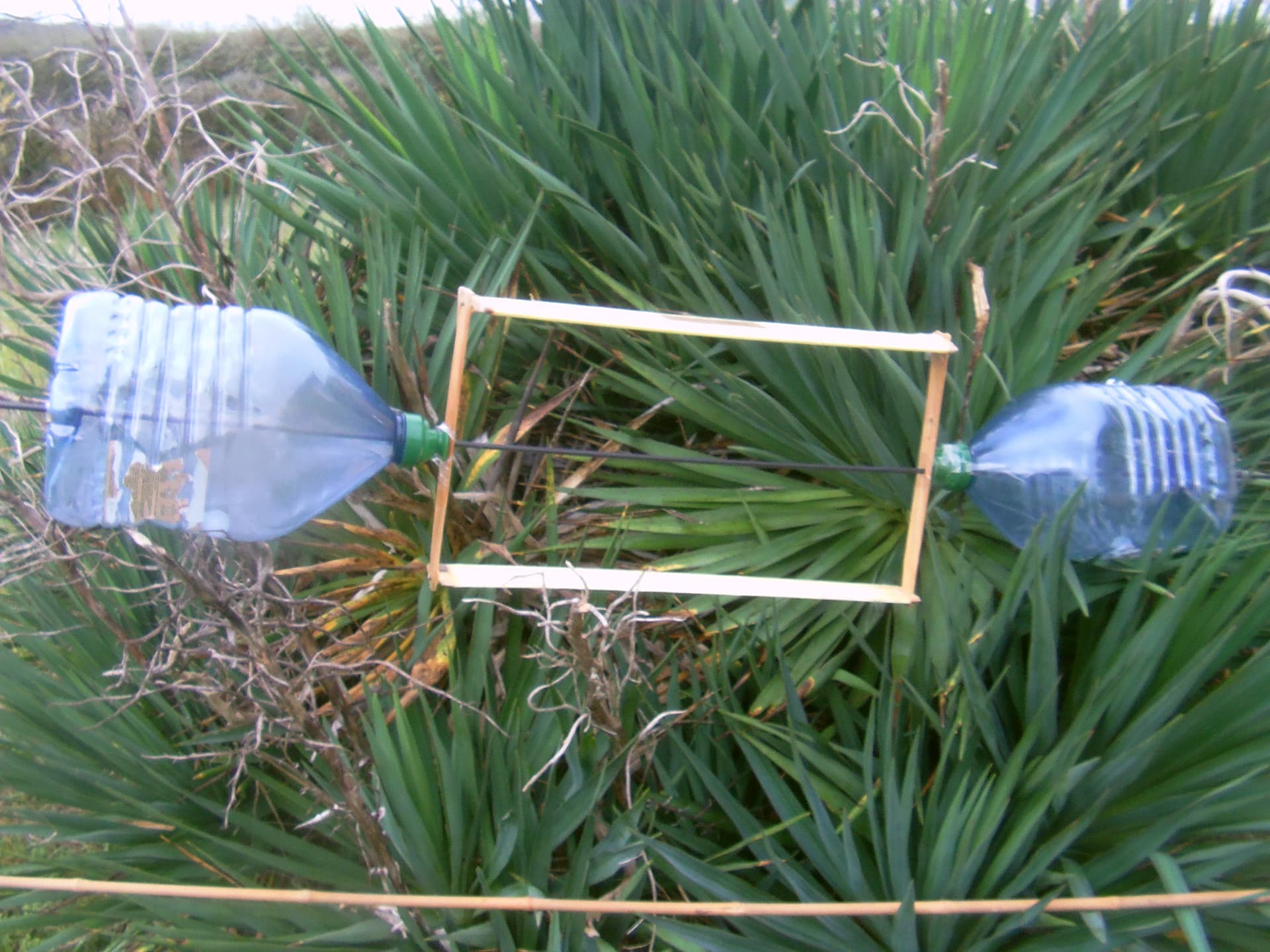
I experimented other configurations such like a Sharp rotor within a VAWT (Darrieus-like). Even with strong wings above 10 m/s, the Sharp rotor did not generate any lift, likely due to interference between both rotors.
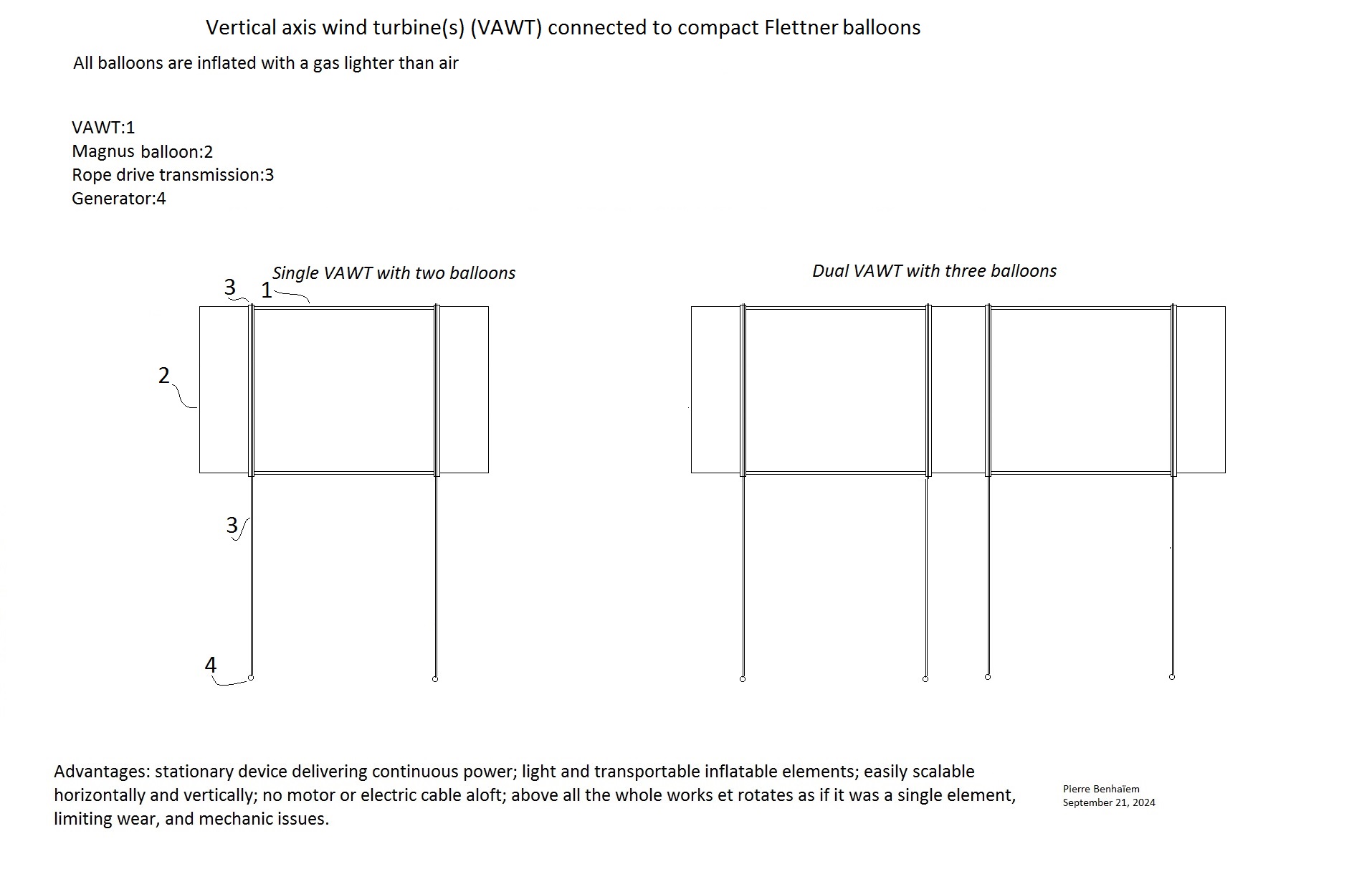
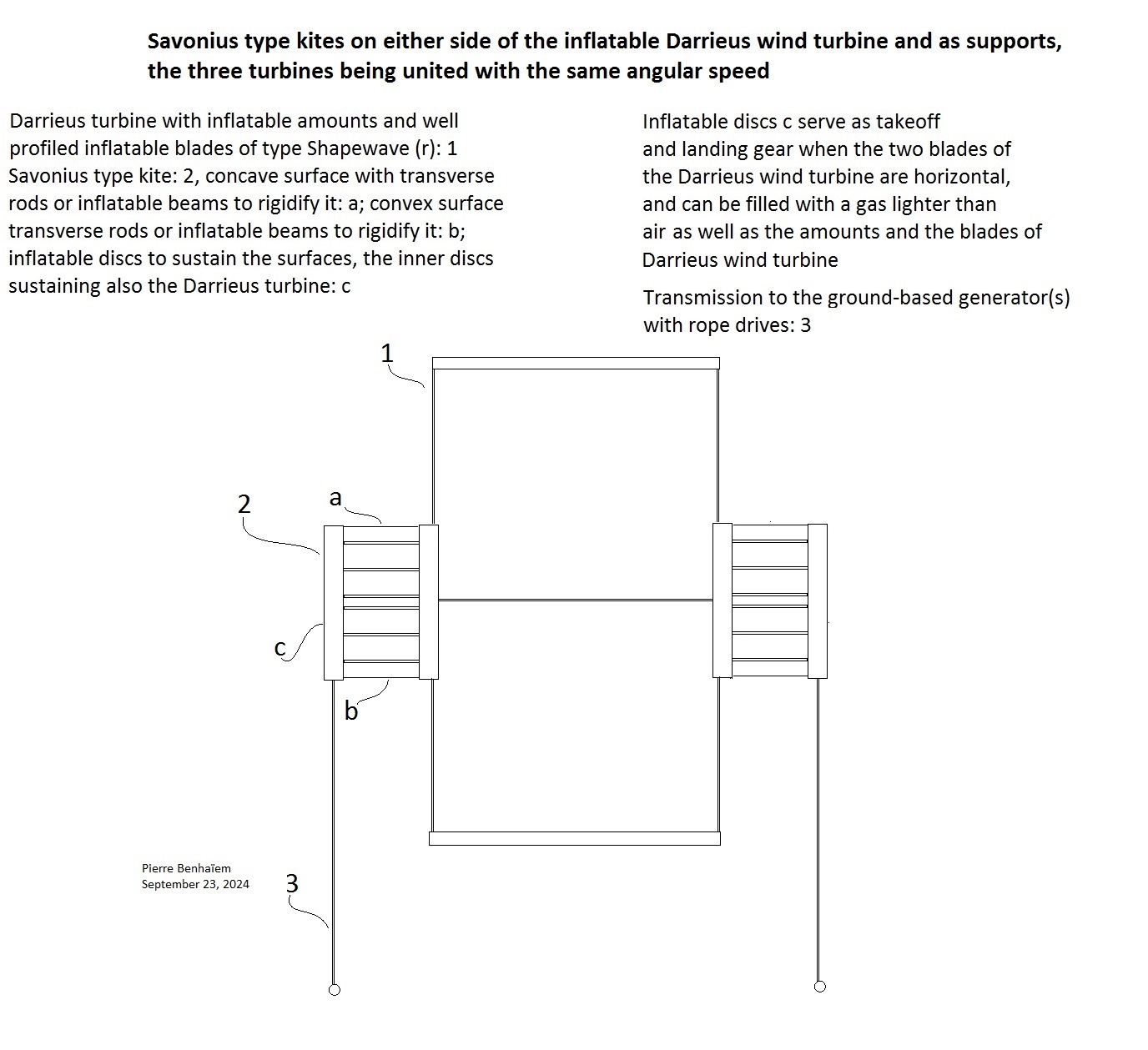
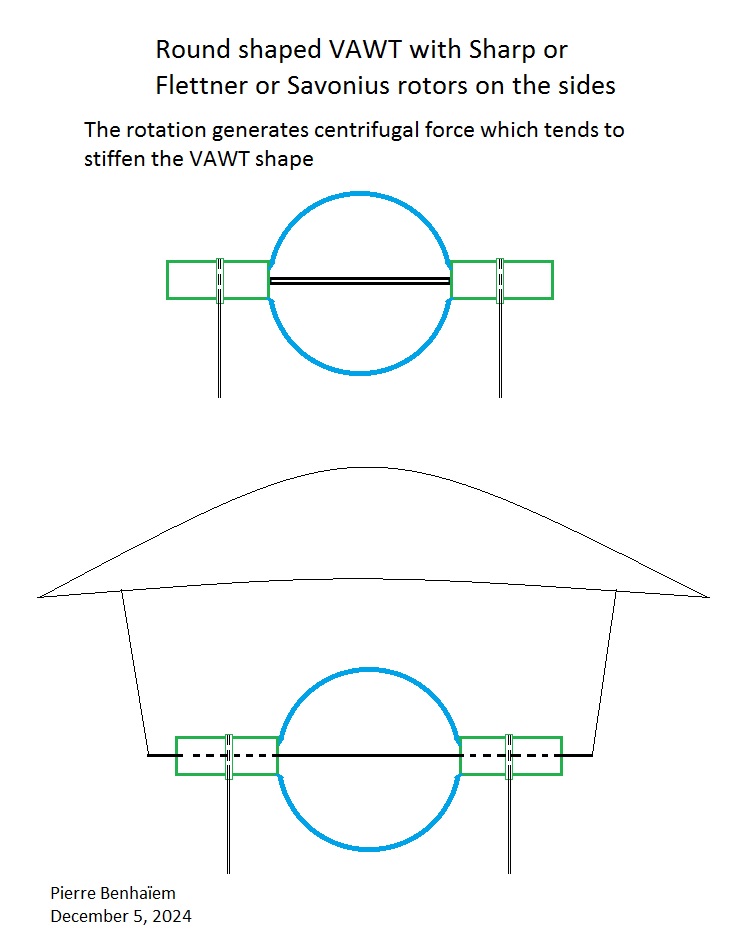
So a side by side configuration is studied. But the maneuver (take-off, landing, then stacking unities close each other) would be far easier if all elements were aligned and of same diameter.
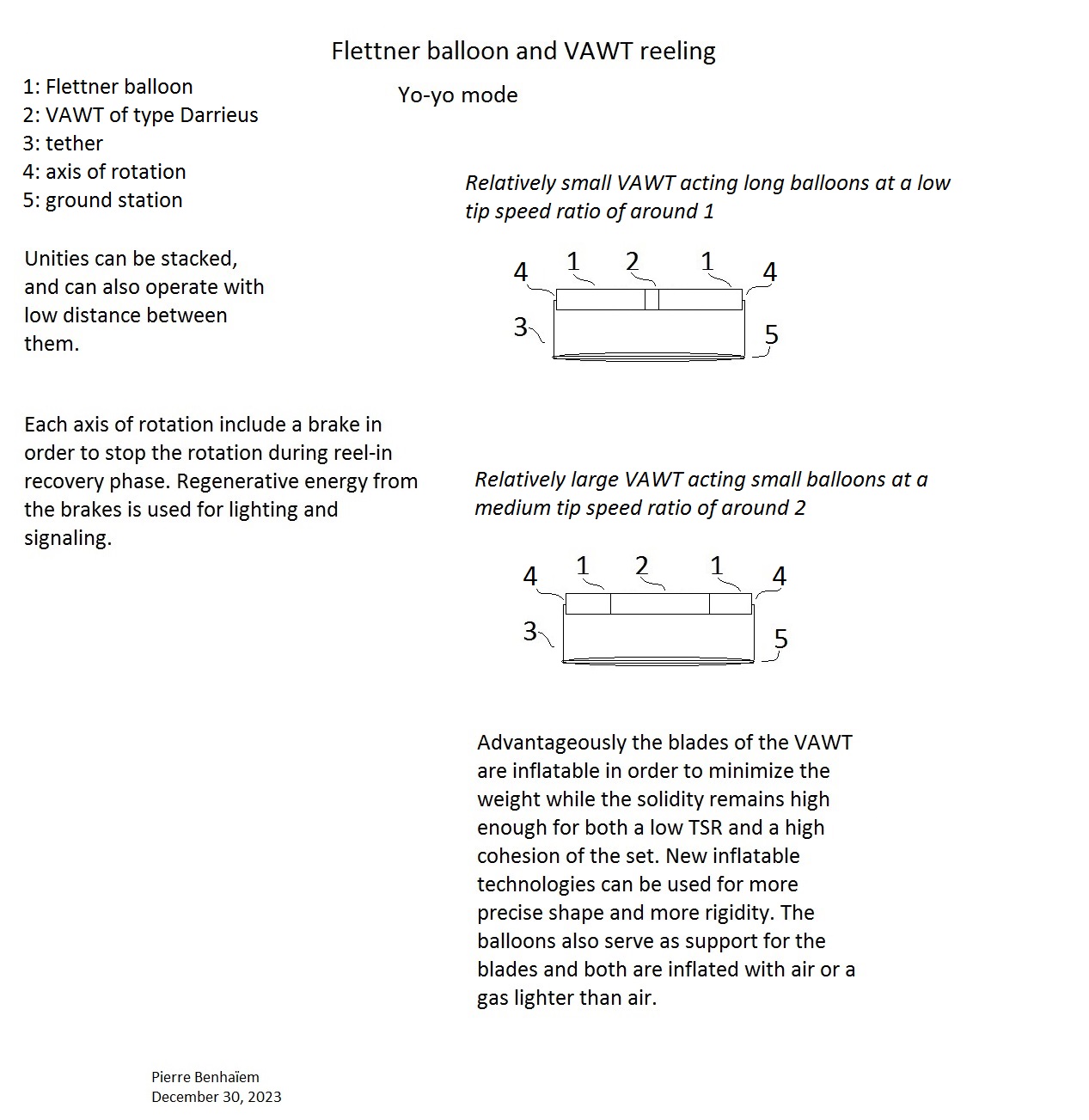
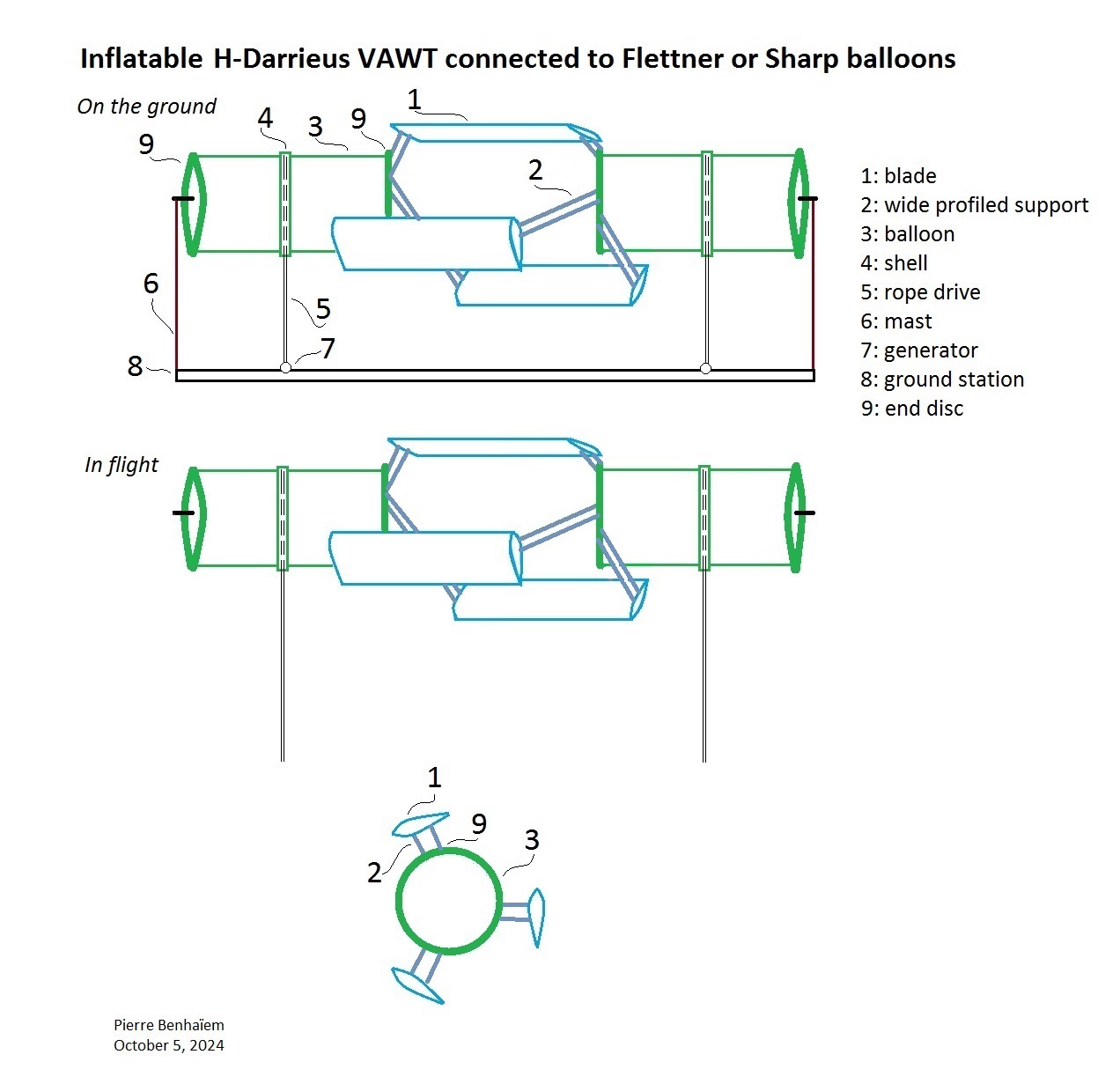
A Flettner balloon is very easy to build and can support the blades of VAWT (Darrieus-like) which can be made by using shapewave® technology. The spin ratio of the Flettner balloon should not be too high, being about 1-1.5. As we know, the power consumption increases by the cube of the tangential speed and would be too high with spin ratio above these values. So the TSR of VAWT should also not be too high, being the same as the spin ratio of the Flettner balloon, leading to a same diameter for all elements.
VAWT Darrieus-like showing low TSR (see Figures 14, 15, 21, and 22) but also high solidity, are studied on:
TSR = 1 or just above with a coefficient of performance of 0.3-0.4 far above that of any Savonius-like rotor.
The high solidity is perhaps not a big issue since for VAWT, the section being the same for the whole length of the blade, unlike the twisted blades for large HAWT, allowing also them to be light by being inflatable and now rigid enough thanks to new inflation technologies.
I put again a sketch as an example:
A Flettner balloon is far easier to build and its power consumption is low for a spin ratio of 1, and acceptable for a spin ratio of 1.5.
See the formula (which I put in full letters) in the last page of the pdf of Experiments on a Flettner rotor at critical and supercritical Reynolds numbers : 0.007 x span x diameter x 3.14 x tangential wind speed³ x air density/2.