Apologies to anyone who may not want to know “too much” about passive kite control, but 15yrs of inquiry sorting thru a vast space of possible rigging solutions converges, iteration by iteration, on progressively optimal and simple rigging designs.
One of the last pieces of the puzzle is the relation of passive dynamics to varying wind velocity. Within a narrow wind range, a kite can be rigged and trimmed to self-oscillate at a desired frequency and amplitude. A quiver of kites from small to large cover the velocity spectrum, each kite overlapping somewhat the velocity range of its sequentially adjoining smaller and larger kites. Where once the question was high line drag of a longline proportion of a small fast kite, the optimum is shortline proportions of larger slower kites, where line drag is negligible.
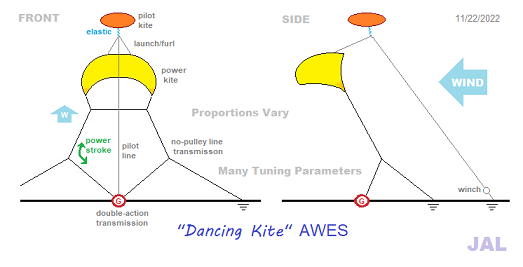
A power kite ideally self-steers its own orbit, but at low or high wind velocity or at min or max work-loading limits, a degree of oversteering or understeering helps match conditions. As usual, there is a tuning of lines and anchor-points that can compensate by the right steering correction factor, the separation distance of two tagline anchors.
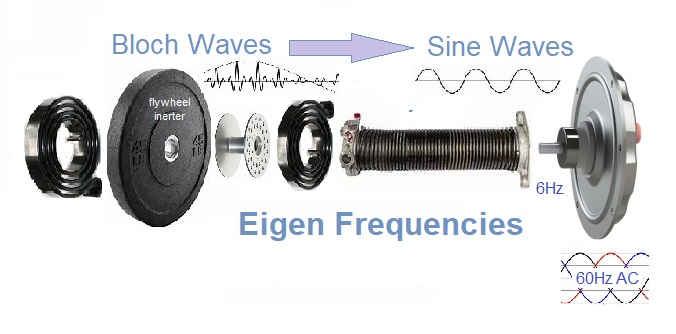
At last, the “secret sauce” of passive-dynamic AWE; spring-mass tuned resonance between kite/wind-PTO/load parameters.
There is new progress understanding Kite Dynamic Stall, which serves several functions. Traditionally, for a classic kite, stall angle passively compensates for higher or lower wind. In kitesurfing, the rider can “power-up” in a jump by a sudden stall. For AWE pattern flying, dynamic stall can serve to maximize power resonantly to the tuned PTO (power take off).
Dynamic Stall not only is peak-amplitude but creates a magically unstable Hopf Bifurcation moment in which tiny control inputs suffice but must be fast to stay within Lyapunov Stability envelope.
We are impatiently awaiting developments with minimally controlled kite networks, to know what giant sets could give, knowing that bifurcation analysis could occur. Indeed the behavior of one kite could be different from that of a multitude of more or less connected kites due to the interaction.
As such an analysis is perhaps even more difficult to carry out on paper than doing the test with kites, the best would be for Dave to get back to work and contact a few members of his team to set up a set of kites whose movements will compensate for themselves by the interactivity of each of the kites, and in a partly chaotic manner, but sufficient to satisfy the two immediate requirements, plus a third: to produce wind power, stay in the air as long as possible, and to take off and land without human intervention.
I think everybody would be happy to welcome a report (a video) of such a work when made, including the present AWEforum.
Nice 5-second video, par for the course. “Look, it wiggles!”
A more meaningful video would show meter(s) indicating how much instantaneous power is being generated. Probably too much to ask. Also, bring a much longer video to convey stable electrical output over a meaningful time period. Showing unloaded motion implies loading it with a generator would severely restrict, or even just stop, whatever motion was taking place while unloaded. hate to have to inject any sense of reality - as usual…
Just for the movement of the kite, and nothing else.
What else should it do?
I think we (myself included) have gotten a little lost on the purpose of these dancing kites.
Have you seen a conversion system to produce measurable, metered electricity on this mobile kite or similar versions that have been shown for years? Not me.
The reason may be that if there is no conversion system after years, it is because there should not be one. The object tells us everything, including its purpose.
So I’m thinking of something like a fun kite activity, such as wind spinners we see here and there as toys.
What I wrote above does not mean that significant power could not be generated in passive control mode.
For a passive crosswind kite (figure-eight or loop), the kite would need to gain speed and amplitude enough in its figures, and make real turns (this would be a challenge for passive control), and not only a slow lateral movement by the cord of the kite (not using the leading edge of the whole wing), which is not suitable for power generation.