For the following some numbers are deduced from
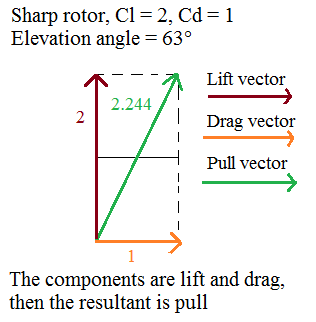
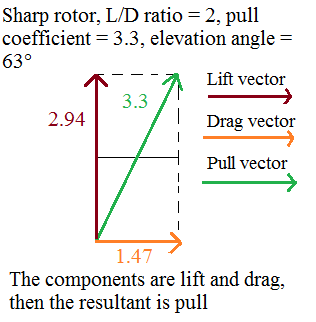
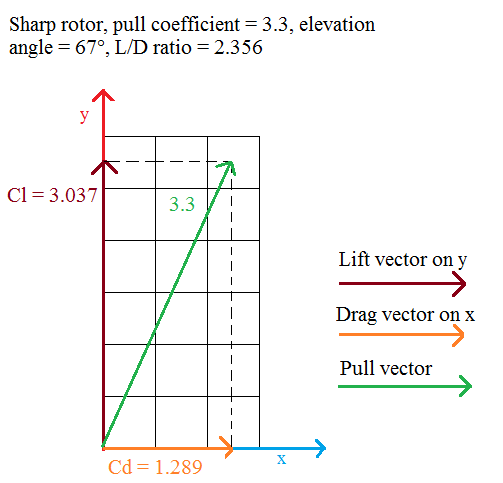
By my experiments and measures (see the videos above) and also some data from the inventor Peter Sharp about the Sharp rotor, the coefficient of pull could be between 2.2 and 3.3, involving in an average power of roughly 0.37 kW/m² for 1), 0.5 kW/m² for 2), and 0.6 kW/m² for 3), using yoyo mode and a vertical trajectory far from the winch as described in the chapter 13 (see at the end of the page) of AWEbook 2018. The three sketches are below:
During reel-out power phase it rotates. During reel-in phase it does not rotate, as for a Flettner rotor, but without spin motor.
Peter Sharp indicates that “A Sharp Rotor, due to its many curved surfaces, will be much stiffer than a cylinder”. So it could scale more than a Flettner-based balloon with the same holding by the two ends.
A solar balloon version would limit landing and take-off operations, without using helium.
As an inflatable version of the Sharp rotor would be highly scalable, as the unities within a farm could be close each other with low damages in the case of collisions, as the risk of collision is limited because the straight trajectory of each unity is easily manageable, the Sharp rotor could be an interesting AWE solution. Indeed the low efficiency per kite area is compensated by a better power/space use ratio.