In addition to AWES like Makani’s wings, a few concepts are being studied, outside AWE field. What could be the interactions in favor of AWES? And vice versa?
Thats really interesting. Mozaero is either pivoting or just branching out from AWE it seems. I would guess the latter given their precense at AWEC recently.
—
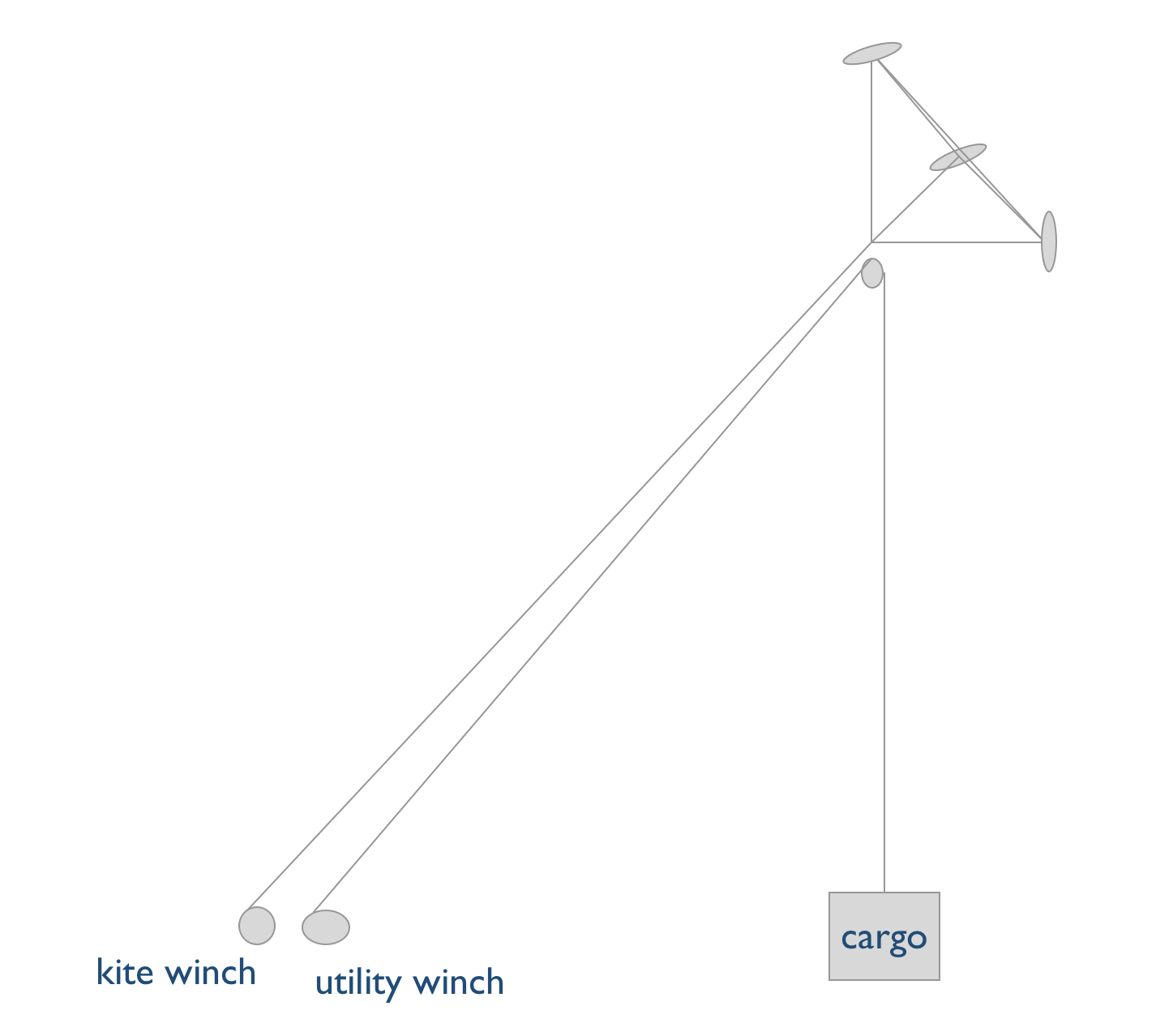
Some of these (the multi plane cargo lifter) is really more like a multi body helicopter. It could work though shooting from the hip, i am not sure its practical.
If I was to use Kitemill’s KM1 3 m2 wing area as a reference, three of those should be able to lift 7.500 N x 3 x 0.5 = 11.250 N. Though we dont have much in terms of forward propulsion.
It just seems like a really hard challenge at larger scale. Maybe even harder than AWE.
At least in this mode of operation, the kites dont need to scale to megawatt capable sizes.
Since the beginning of the 2000s, concepts for transporting payload with multiple tethered aircraft have been proposed to balance the lateral loads on a stationary payload. An alternative, initially developed in the 1940s considered a single aircraft and long tether to minimize the lateral motion of the payload during the circling motion of the aircraft in hover.To shorten the tether and reduce the drag losses associated, a concept with a single aircraft and an active stabilization system on the payload is proposed. This paper demonstrates that a single Pipistrel Sinus can vertically lift a stabilized underslung payload of 660 lb (300 kg) at 6,000 ft (1,800 m) under temperature conditions of 95 ◦F (35 ◦C) with 54 hp (40 kW) and a reduction of 70% of the tether length compared to a non-stabilized payload
Despite showing great lifting capabilities, systems with two-or more aircraft still present some shortcomings. If the use of unmanned aircraft has solved the problem of the need for repetitive and precise flight paths, it adds some control issues. Indeed, in hover and from a top view, the airplane shave to maintain an angle of 180◦ between them in the case of two-aircraft systems in order to sustain the same horizontal component of the tether tensions to enhance the payload equilibrium. As the airplanes are unmanned, an embedded control has to be designed which presents some challenges, especially in windy conditions as the airplane shave to change their true airspeed. To remove this phase problem, an alternative solution is to use only one aircraft as proposed by Williams (Refs. 9, 10) or Sun to recover a micro air vehicle (Refs. 11, 12). However, using only one aircraft leads to the removal of the payload’s natural equilibrium given by multi-aircraft systems. Williams solved this problem by lengthening the tether to reach about 3 km (1.86 miles) to minimize the lateral motion of the payload. He proved that with a light aircraft similar to that Nate Saint used and for payload masses between 50 kg (110 lb) and 500 kg (1100lb),the payload path reduces to a circle of around 1.5 m on a numerically prescribed flight path. Nonetheless, a tether of approximately 3 km produces large drag losses, reduces the accuracy of the payload position, and even shifts the payload position in windy flight conditions as pointed out by Murray and Williams (Refs. 10, 13, 14). It should also be noted that at these lengths, the weight of the tether itself is non-negligible.
Latest AWE hype cycle news: 15 years now, and still nothing in regular operation.
All those “really smart people”…
“Pivoting from AWE” timeline:
Joby: an early announced AWE “player” - never came up with much except making motors, or more likely having them made - early-on pivot to EVTOL, billions spent, hundreds (thousands?) employed, 15 years later, still “getting ready to get ready”, with only a few demos and a lot of handwaving and happy-talk to garner govt funding.
Altaeros: Announced successful grid powering in a remote town in our 49th state Alaska, which never quite happened. Realized their only supposed acquired skill was filling blimps with helium, so they “pivoted” to airborne wifi from a blimp. Result? Nothing of note.
Makani / Google: Announced impending powering of hundreds of homes in the 50th state - remote island of Hawaiin chain - Posed as the leading AWE player - had us all fooled til we saw videos of their aircraft in flight, easy to see it was not hitting the mark. Result - used a single crash as an excuse to “just give up” - “pivoted” back to web search… no further AWE activity, turned out they never knew what they were doing.
Skysails, spent well over a decade talking up “in the future” success towing ships with kites, got a couple of demos going, "Beluga?) (bankrupt?) “pivoted” to AWE for electricity production, announced a factory and worldwide sales years ago, and a project powering the grid of a remote island of Mauritius, which seems to never have taken hold. Result? No more sales, no product being sold worldwide, still nothing running on a regular basis. Just announced an independently-measured power curve.
Hi Doug, yes. Both MAWES and towering payloads by tethered planes flying a circular path as discussed here, use a similar architecture with a single anchor and a single main tether, in such a way that the ground station could pivot or even is pivoting to face the wind for MAWES.
At 1:36 (where the video starts), we can see an old concept of a towing plane towing several (here inflatable) gliders.
Apart from that, let us note the harsh criticisms addressed to inflatable planes (which we hardly see), which could call into question the inflatable blades of wind turbines (which we see almost nowhere), and therefore quite a few of my hypothetical ideas aiming to use inflatable blades.