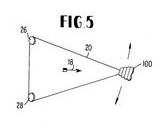
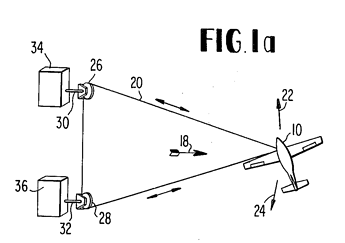
I think the tether network anchored in 2 points (figures above) or 3 points (tri-tether) acts simultaneously on these points, all lines composing the tether network being connected. As a result a significant part of the force is an useless parasitic force.
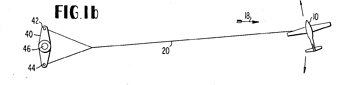
FIG. 1b describes a lever with a strand stretched at each end, and which can be easily tested: the pull on the rope and its perpendicular move to said pull will have a minimal effect on the rotation of the lever. This is the reason why only one strand is in action on OrthoKiteBunch, the other being slacked. But that supposes an active control on each of the two winches respectively located at the two ends of the lever, and therefore more complexity.